多旋翼无人机装配与群体协同虚拟仿真实验
开始实验



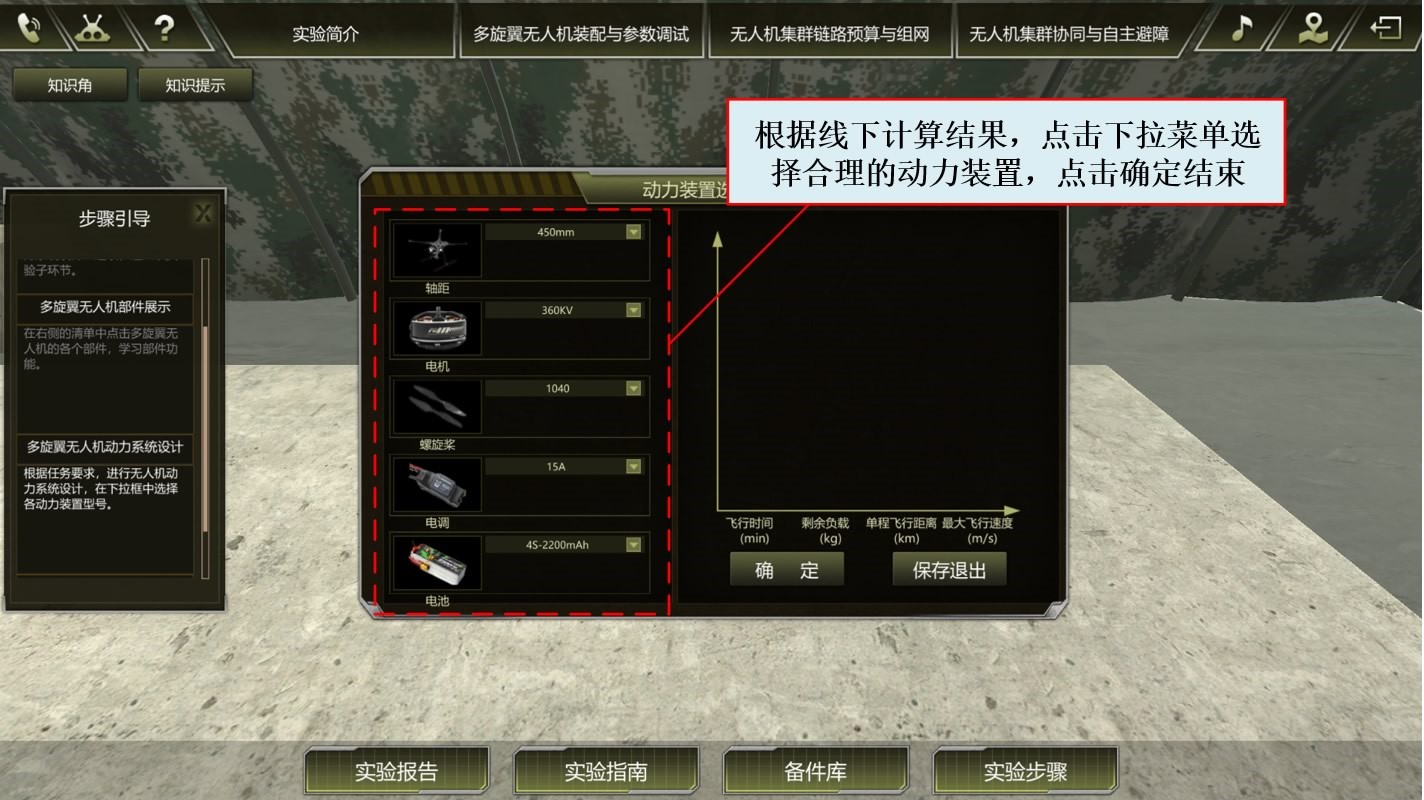
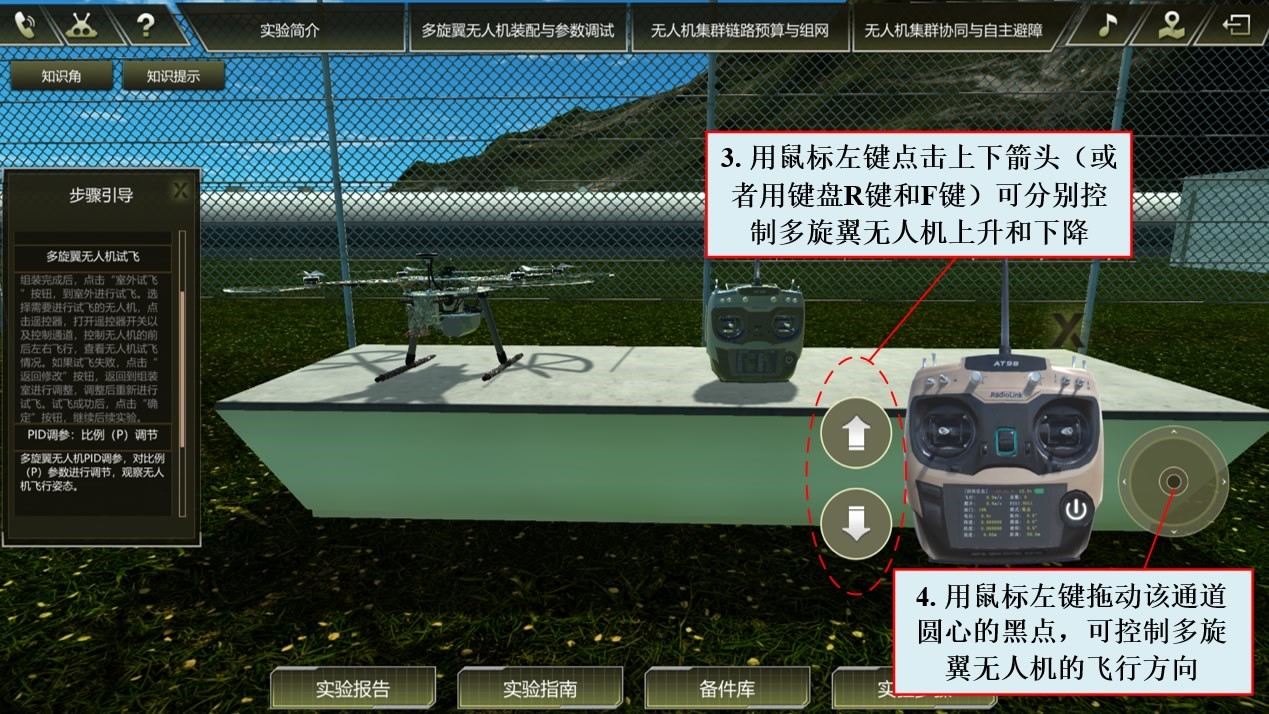
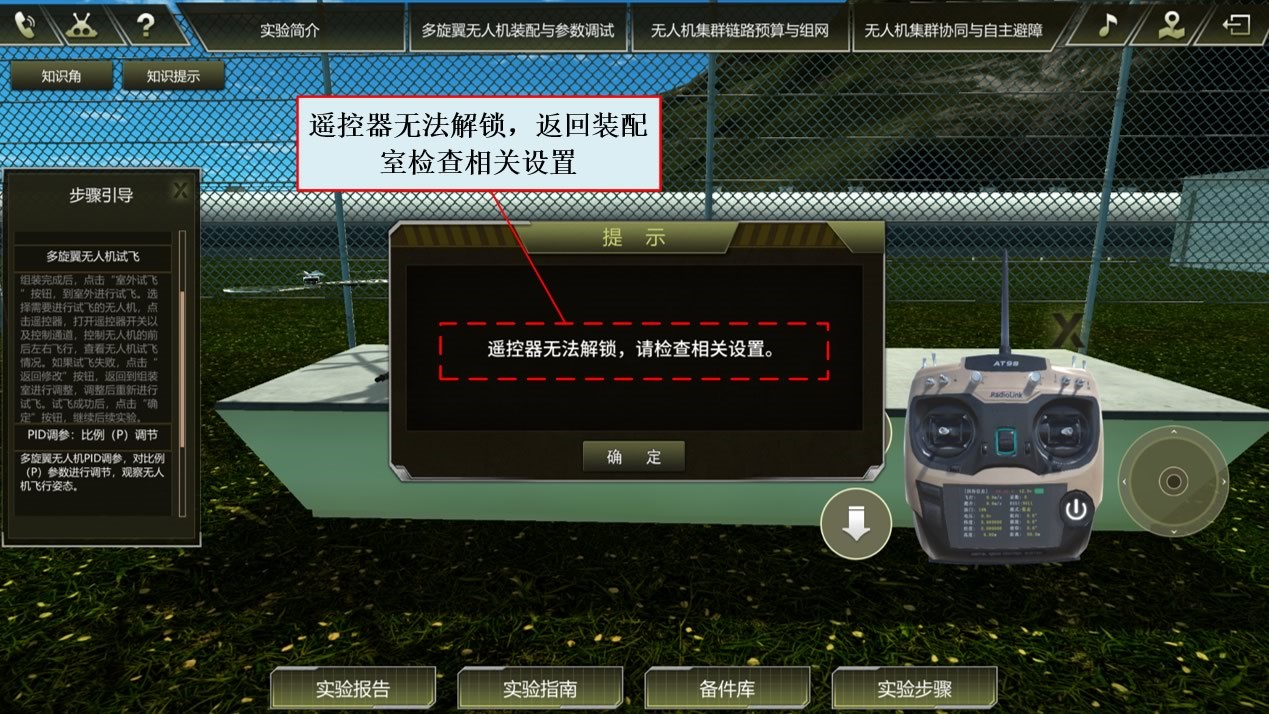
多旋翼无人机装配与参数调试













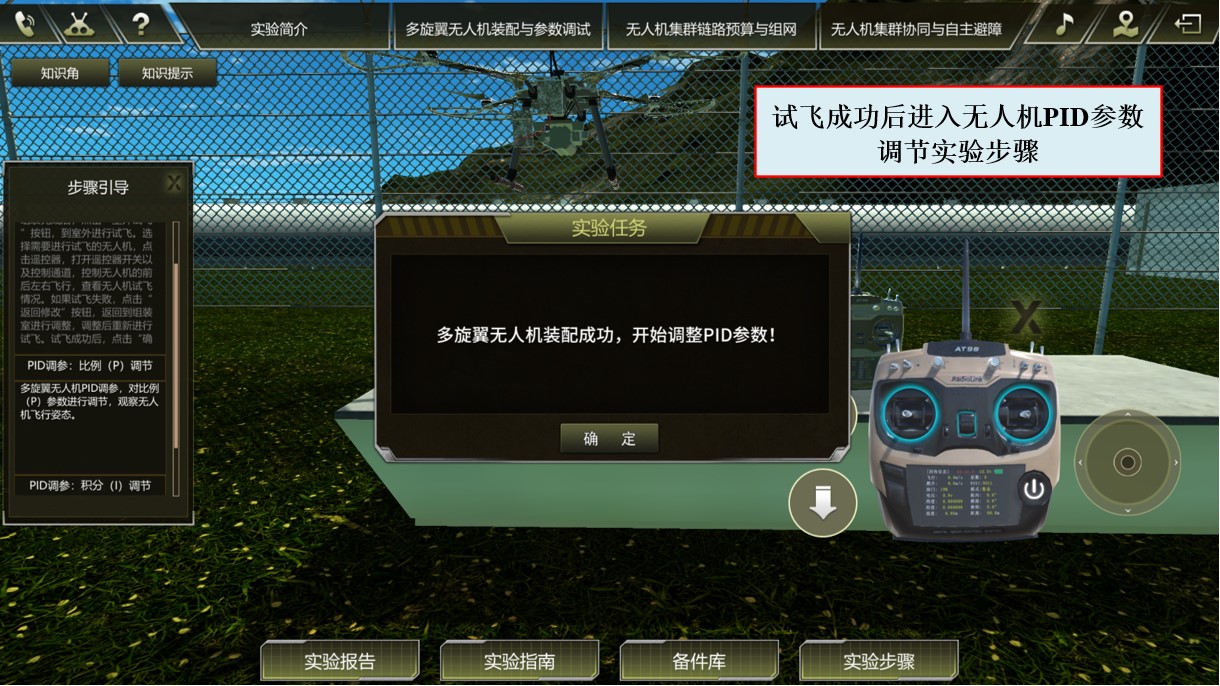

对微分(D)参数进行调节,观察无人机飞行姿态。如果无人机姿态调整对于输入指令响应迟缓,应当增大D的值;如果无人机高频抖动,则应该降低D的值。
通过调节PID控制参数,最终使得多旋翼无人机飞行状态平稳。
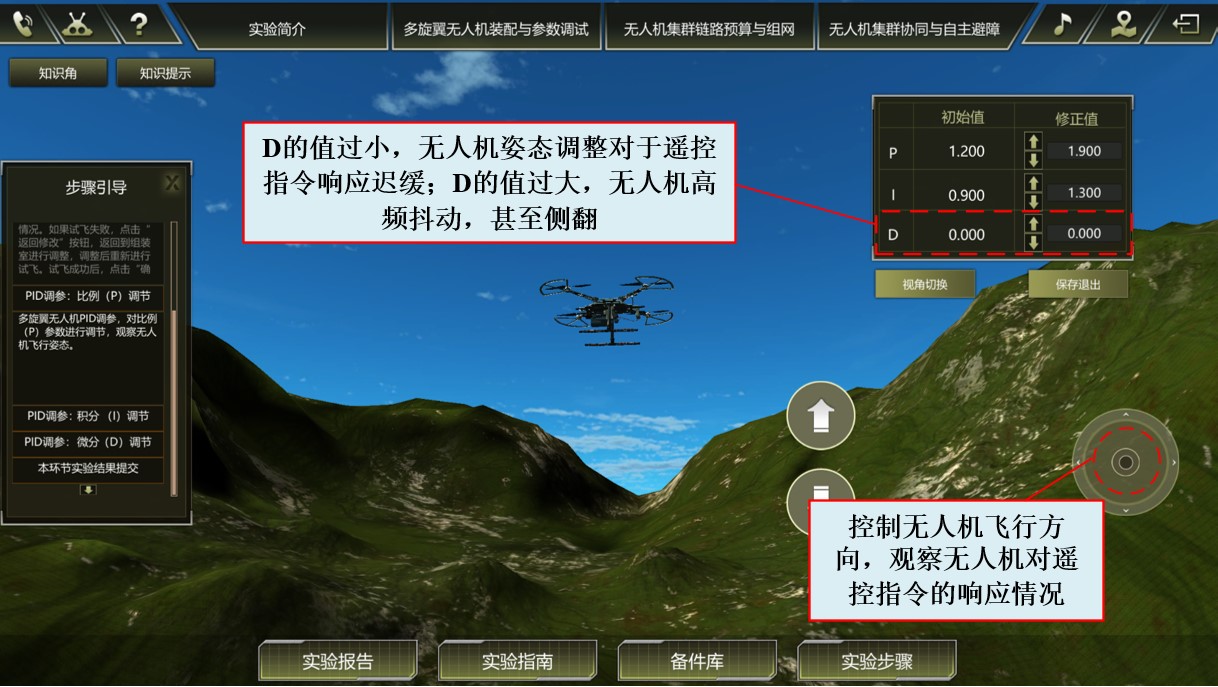
图27 微分(D)参数调节
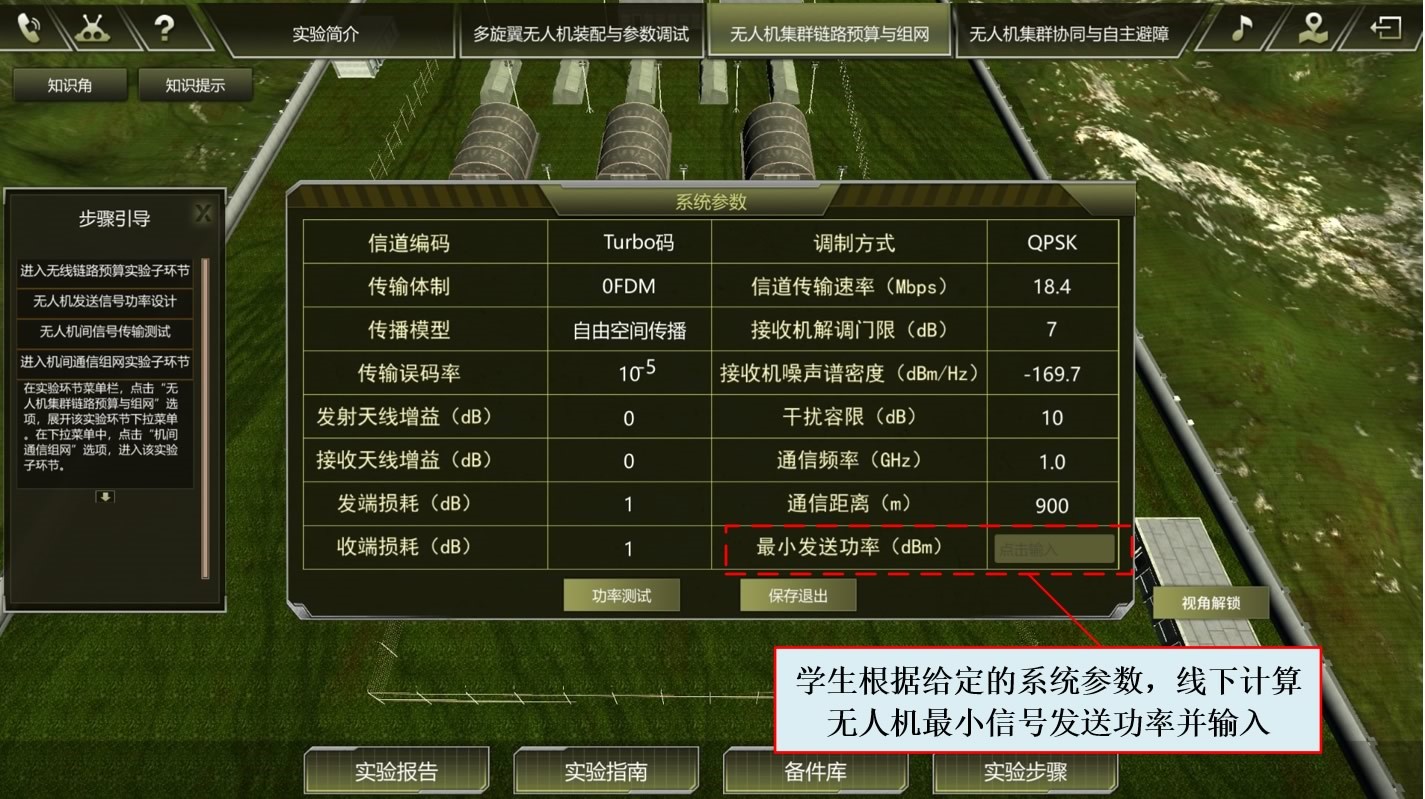
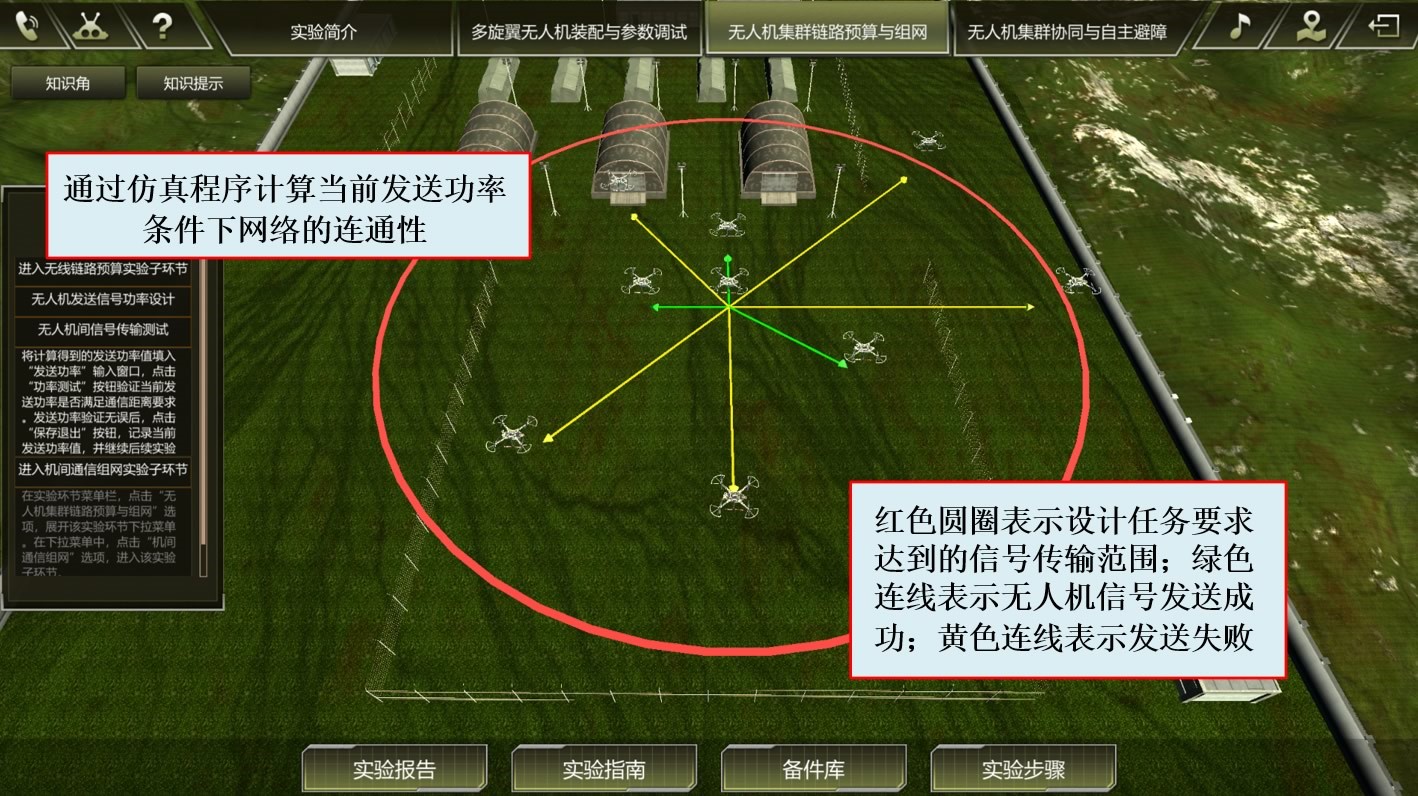
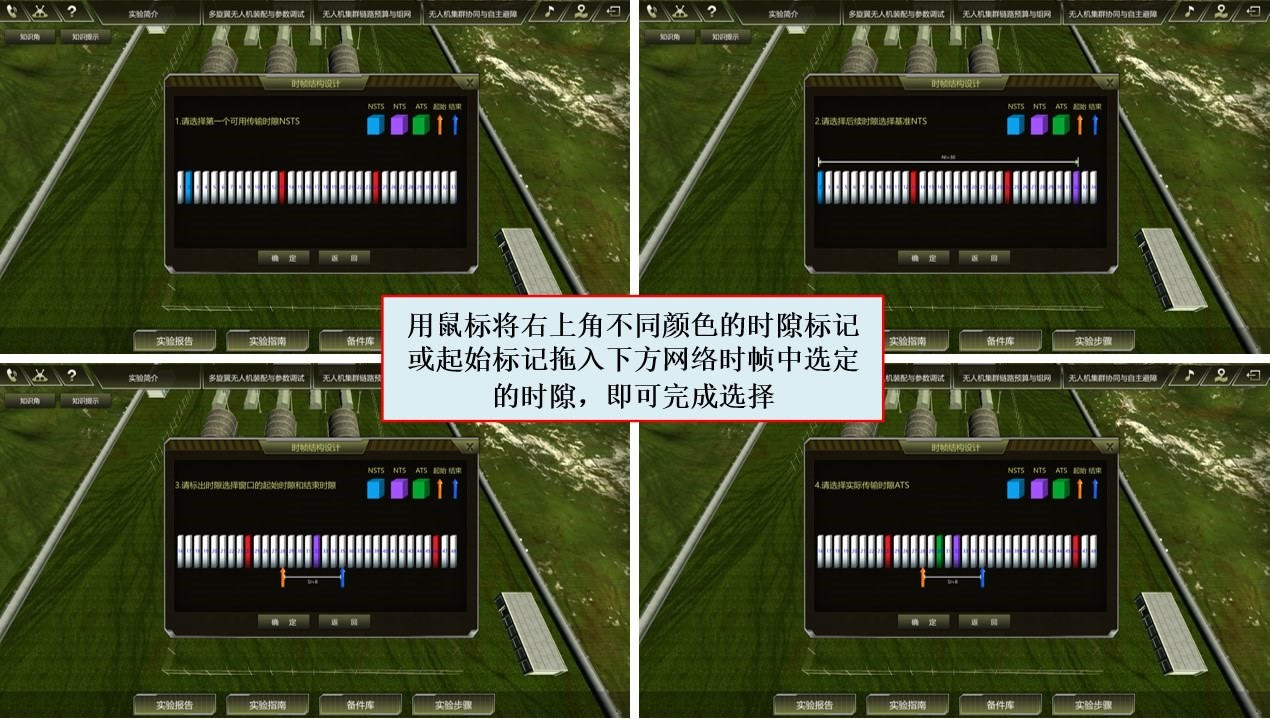
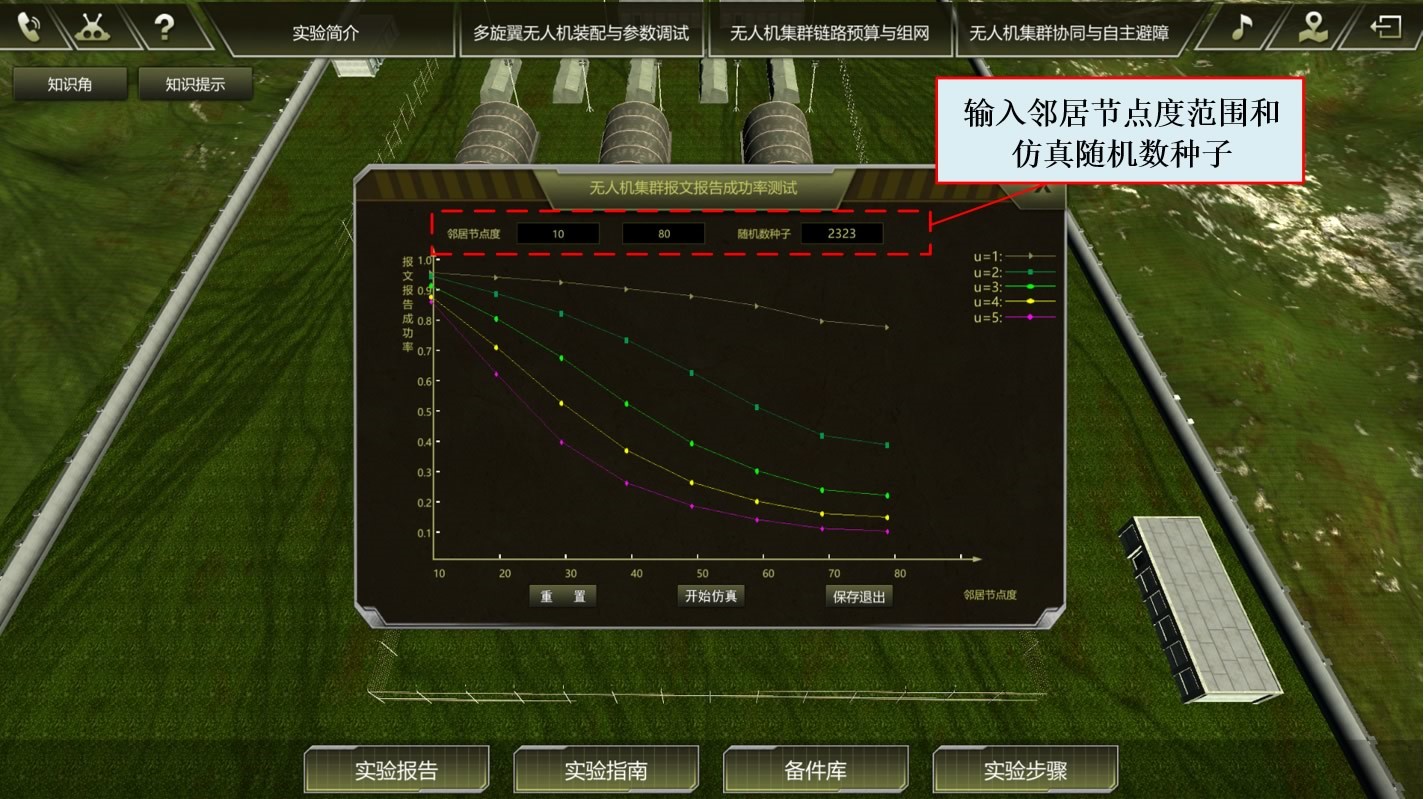
环节二:无人机集群链路预算与组网


环节三:无人机集群协同与自主避障
Boid模型给出了集群行为的三条基本规则,防碰撞、速度匹配和聚合。本环节采用虚拟力场法实现基于Boid模型的群体协同与自主避障。该方法将Boid模型对无人机集群节点运动的影响类比为力对物体运动的影响。本实验环节要求学生探究目标无人机节点处在不同区域时虚拟力场的变化情况,观察基于平行四边形法则的虚拟力合成过程。通过科普化的类比,降低学生理解虚拟力场法的难度。
学生拖动高亮无人机至另一架无人机的聚合区域、防碰撞区域、速度匹配区域、避障区域和其他区域,观察不同区域的虚拟力场合成情况,理解虚拟力场法的原理。
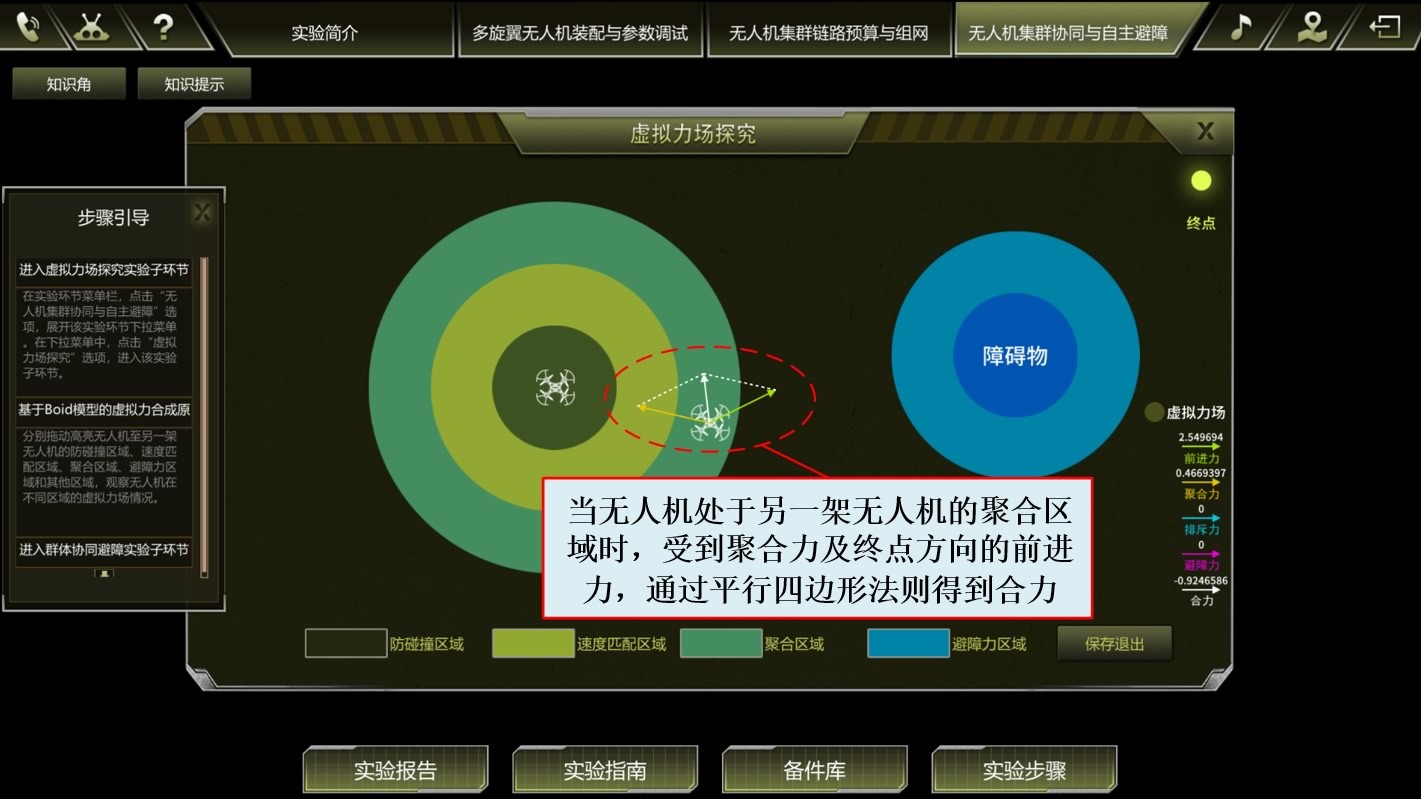
图37 聚合区域虚拟力场分析
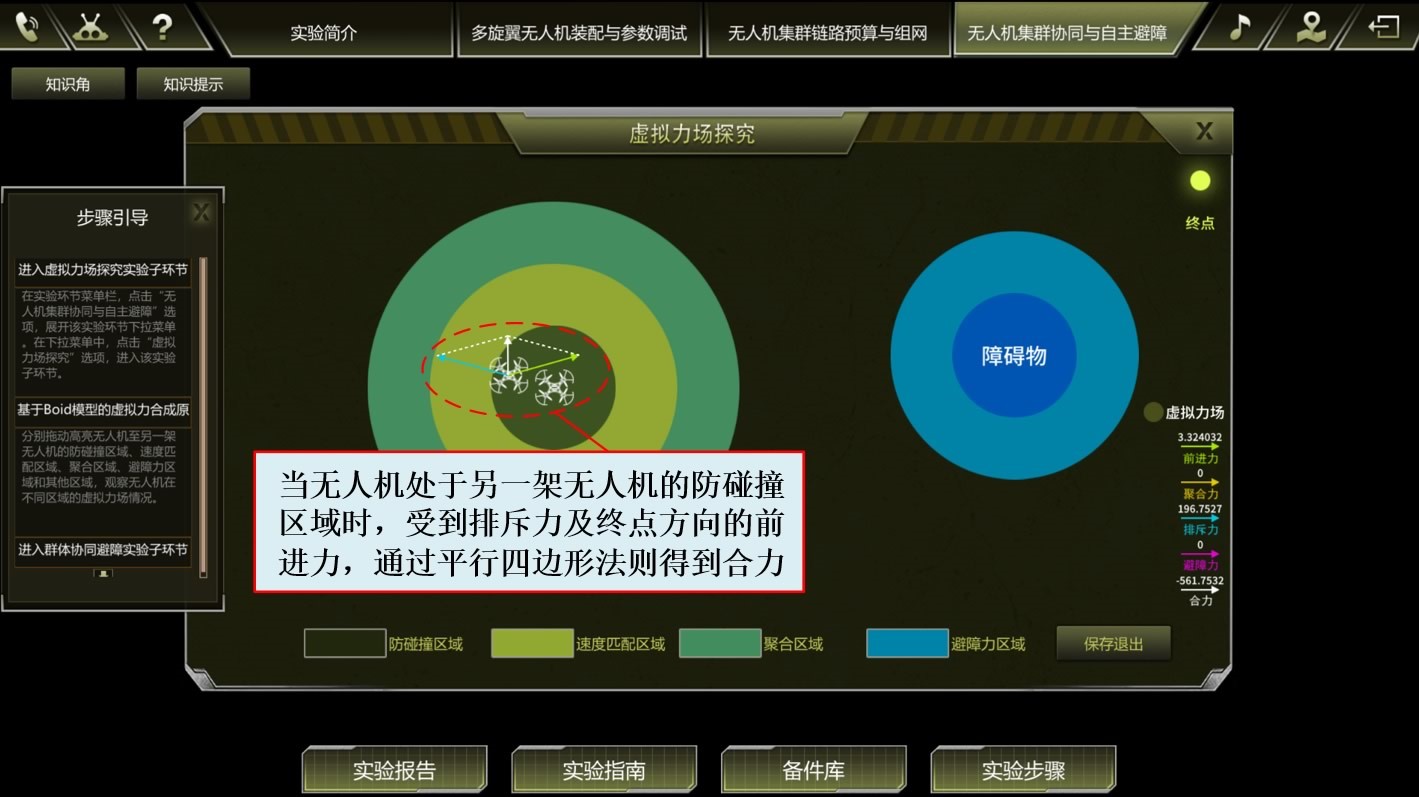
图38 防碰撞区域虚拟力场分析
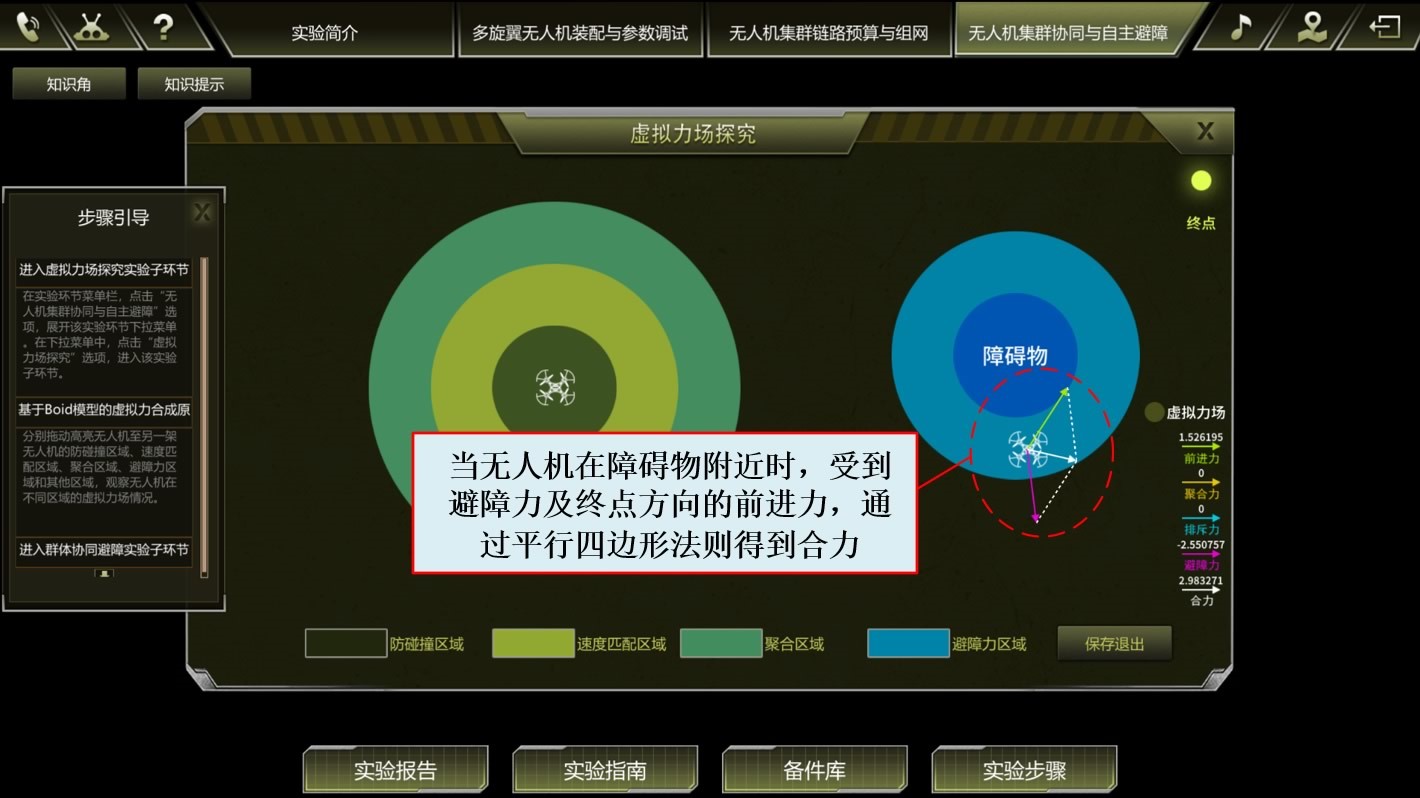
图39 避障力区域虚拟力场分析
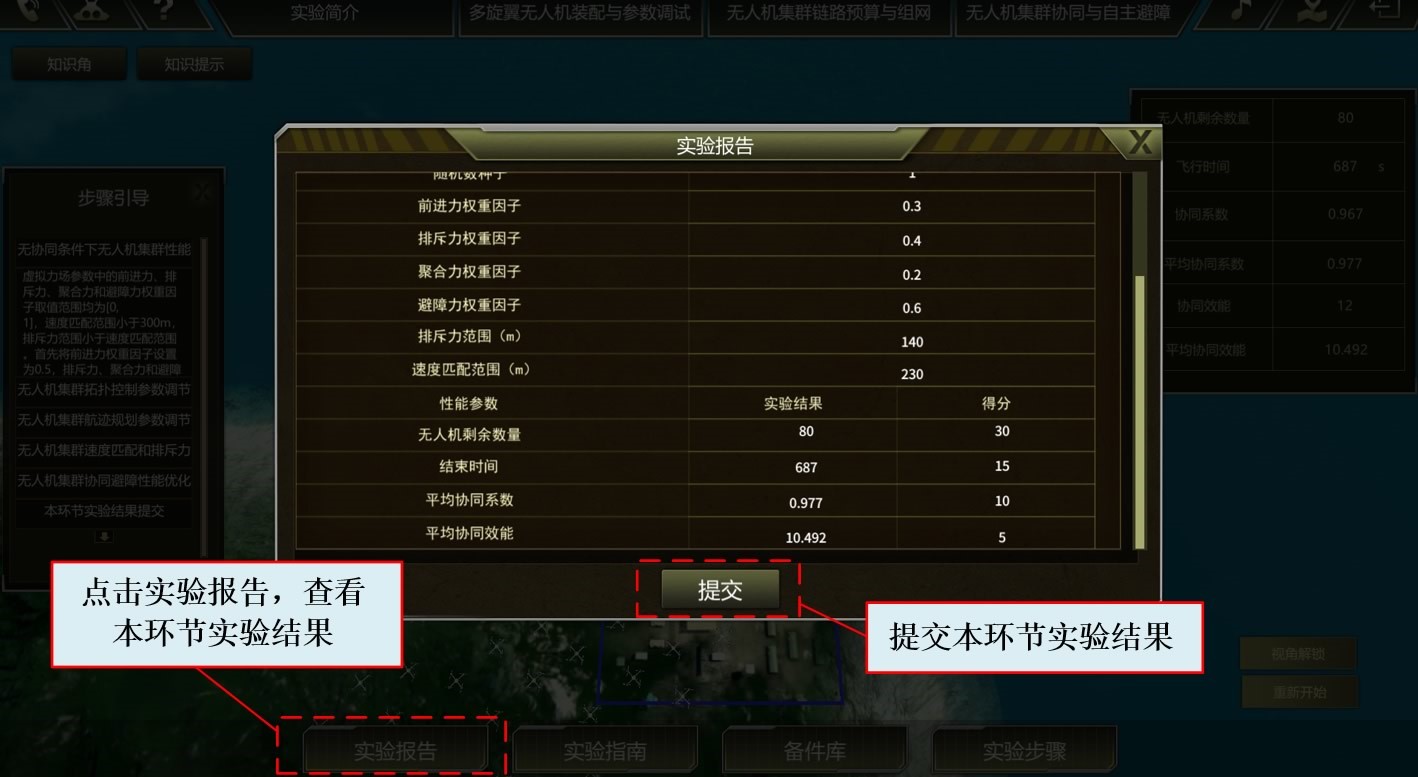
将前进力权重因子设置为大于0的任意值,排斥力、聚合力和避障力权重因子,排斥力范围,速度匹配范围均设置为0,测试无协同条件下无人机集群的性能。
操作示例:如图40所示,我们将初始无人机数量设置为100架,将前进力权重因子设置为0.8,排斥力、聚合力和避障力权重因子,排斥力范围,速度匹配范围均设置为0。无人机集群从我方基地起飞,在第二次遇到障碍物之后,所有飞机均被撞毁。

图40 无协同条件下无人机集群性能测试
将虚拟力场参数中的前进力和避障力权重因子设置为大于0的固定值,改变排斥力和聚合力权重因子(拓扑控制参数),分析它们的相对取值对无人机集群性能的影响,确定合理的取值。
操作示例:我们将初始无人机数量设置为100架,前进力和避障力权重因子均设置为0.6,排斥力范围和速度匹配范围分别设置为100米和200米。将排斥力和聚合力权重因子分别设置为0.8和0.2,仿真过程和结果如图41所示;将排斥力和聚合力权重因子分别设置为0.2和0.8,仿真过程和结果如图42所示。由仿真过程和结果可以得出结论:如果排斥力权重因子相比聚合力权重因子设置过大,避障效果好,但无人机集群覆盖范围过大,协同效能低;反之则无人机分布密集,协同效能高,但容易撞毁。

图41 排斥力权重因子设置过大条件下无人机集群性能测试

图42 聚合力权重因子设置过大条件下无人机集群性能测试
将虚拟力场参数中的排斥力和聚合力权重因子设置为大于0的固定值,改变前进力和避障力权重因子(航迹规划参数),分析它们的相对取值对无人机集群航迹规划的影响,确定合理的取值。
操作示例:我们将初始无人机数量设置为100架,排斥力和聚合力权重因子均设置为0.4,排斥力范围和速度匹配范围分别设置为100米和200米。将前进力和避障力权重因子分别设置为0.8和0.2,仿真过程和结果如图43所示;将前进力和避障力权重因子分别设置为0.2和0.8,仿真过程和结果如图44所示。由仿真过程和结果可以得出结论:如果前进力权重因子相比避障力权重因子设置过大,避障效果差,但集群飞抵敌方基地上空需要的时间短;反之则避障效果好,但飞抵敌方基地上空需要的时间长。

图43 前进力权重因子设置过大条件下无人机集群性能测试

图44 避障力权重因子设置过大条件下无人机集群性能测试
将虚拟力场参数中的前进力、排斥力、聚合力和避障力权重因子设置为大于0的固定值,改变速度匹配范围和排斥力范围,分析它们对无人机集群性能的影响,确定合理的取值。
操作示例:我们将初始无人机数量设置为100架,排斥力、聚合力、前进力和避障力权重因子分别设置为0.4、0.6、0.6、0.4,速度匹配范围大于排斥力范围,排斥力范围分别设置为300米和50米。仿真过程和结果如图45、46所示。由仿真过程和结果可以得出结论:排斥力范围设置过大,无人机分布稀疏,协同效能低,避障效果好;反之则无人机集群分布密集,容易撞毁,协同效能高。

图45 排斥力范围设置过大条件下无人机集群性能测试

图46 排斥力范围设置过小条件下无人机集群性能测试