
多旋翼无人机装配与群体协同虚拟仿真实验
本实验项目依据《无人机集群技术》课程大纲及关键知识点,结合无人机集群的军事应用背景,以“装配多旋翼无人机并实现群体协同”为实验任务,构建了基于作战想定的虚拟仿真实验情景。实验旨在培养学生探究式的思维方式和解决复杂问题的综合能力,具体实验目的包括:(1)通过多旋翼无人机装配与参数调试实验环节,帮助学生掌握多旋翼无人机组成原理、动力学模型、装配要点及PID控制原理,探究实际工程应用需求导向的多旋翼无人机动力装置设计方法,使学生具备根据多旋翼无人机飞行姿态,分析、判断并调节PID参数的能力。(2)通过无人机集群链路预算与组网实验环节,帮助学生掌握无线电传播特性、无线通信系统链路预算方法、信道接入控制方法及自组织时分多址协议原理,探究无人机集群网络无线信号冲突解决方案,使学生具备从协议栈分层的角度开展无人机集群网络设计的能力。(3)通过无人机集群协同与自主避障实验环节,帮助学生掌握基于Boid模型的集群运动原则、基于虚拟力场法的无人机集群拓扑控制和自主避障方法,探究虚拟力场参数对无人机集群性能的影响,使学生具备根据工程实际需求,对无人机集群协同性能进行调整的能力。
开始实验
开始实验
122个交互性操作步骤。

步骤一
如图1所示,本项目综合采用了自主设计法、控制变量法、观察法和类比法等实验方法,实验包含图1 实验步骤
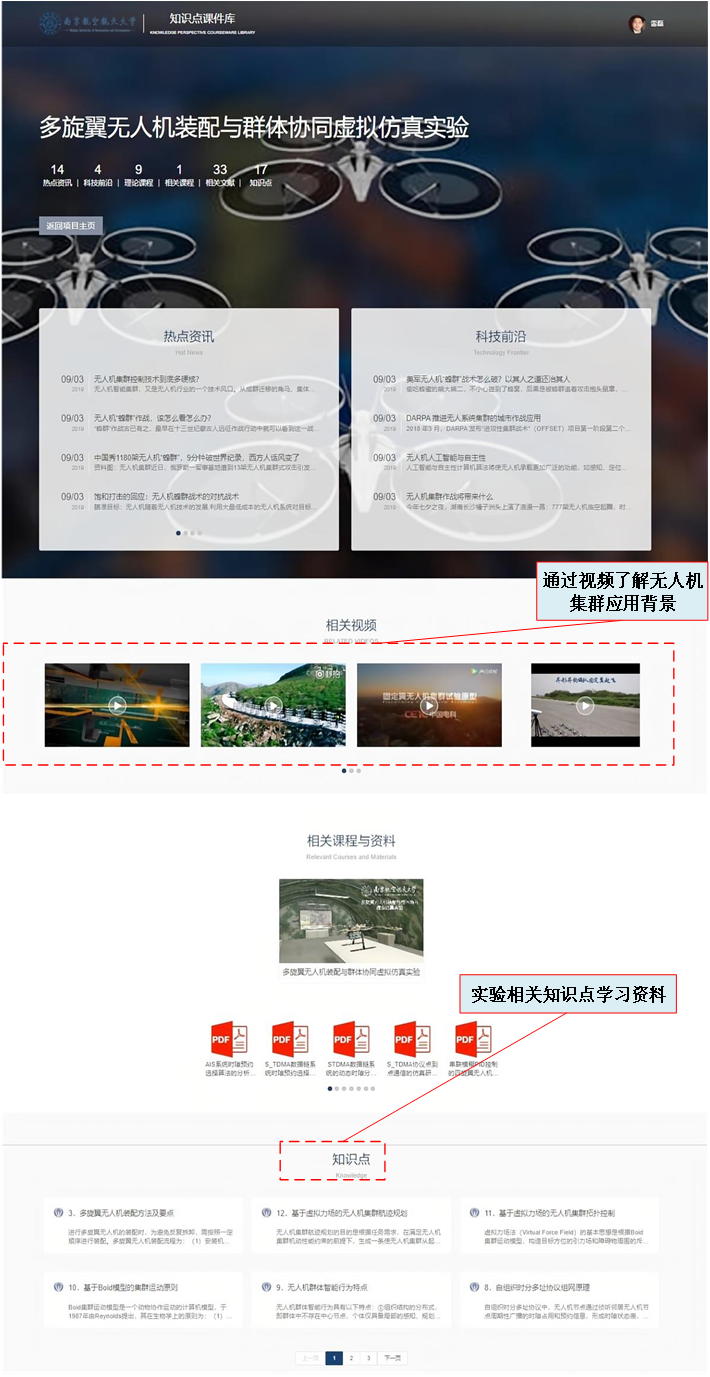
2如图2所示,在浏览器中输入本实验项目的网址(http://uavswarm.nuaa.edu.cn), 即可打开本实验项目,在线完成所有实验操作。然后进入图3所示的实验界面, 学生查看实验简介。


图3 进入实验界面
步骤二
图2 本项目实验网站
3
步骤三
并通过在线知识角(图4)的中的文献和视频资料,对本实验相关知识点进行自主学习。实验过程中,学生可以随时打开实验步骤引导。遇到任何困难,可以随时与课程顾问老师联系。
图4 本项目在线知识角
END
环节一:多旋翼无人机装配与参数调试
实验包括“动力系统设计”、“无人机装配”和“整机装配调试”三个子环节,对应实验步骤 1 至 9。通过该实验环节,使学生掌握多旋翼无人机组成原理、动力学模型、装配要点及 PID 控制原理;要求学生探究实际工程应用需求导向的多旋翼无人机动力装置设计方法,使学生具备根据多旋翼无人机飞行姿态,分析、判断并调节 PID 参数的能力。
如图 5 所示,在实验环节菜单栏,点击“多旋翼无人机装配与参数调试”选项,展开该实验环节的下拉菜单。在下拉菜单中,分别点击“动力系统设计”、“无人机装配”和“整机装配调试”选项,即可进入相应实验子环节。
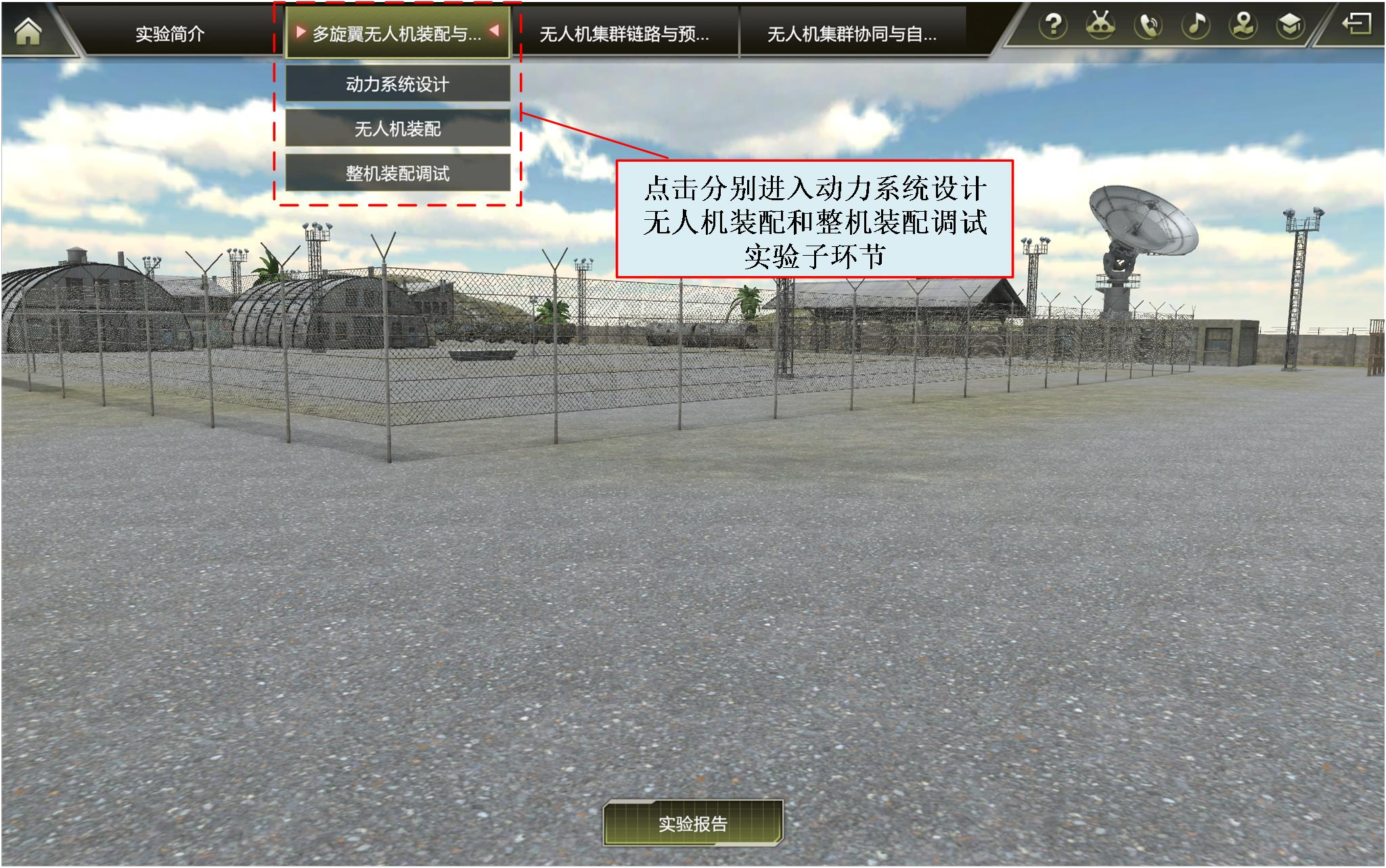
图5 多旋翼无人机装配与参数调试实验环节
1
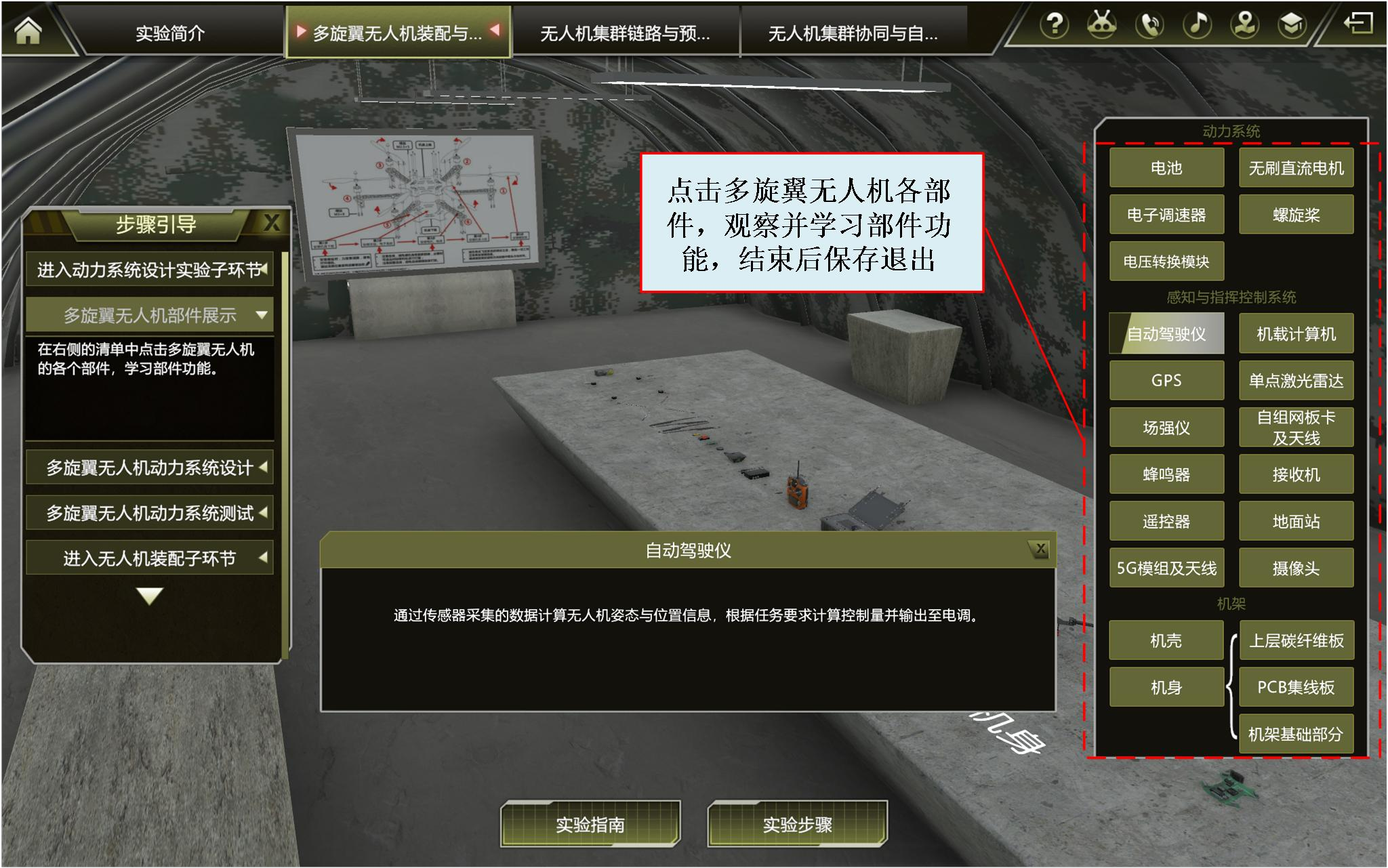
步骤1 多旋翼无人机部件功能学习
在图 6 所示的装配操作台上(或右侧清单中)点击多旋翼无人机各个部件,观察并学习部件功能,结束后保存退出。
图6 多旋翼无人机部件学习
2如图 7 所示,本步骤随机生成动力系统设计任务。如图 8 所示,学生线下计 算并点击下拉菜单选择合理的动力装置,点击确定结束。


步骤2 多旋翼无人机动力系统设计
图7 随机生成动力系统设计任务
图8 多旋翼无人机动力装置选配
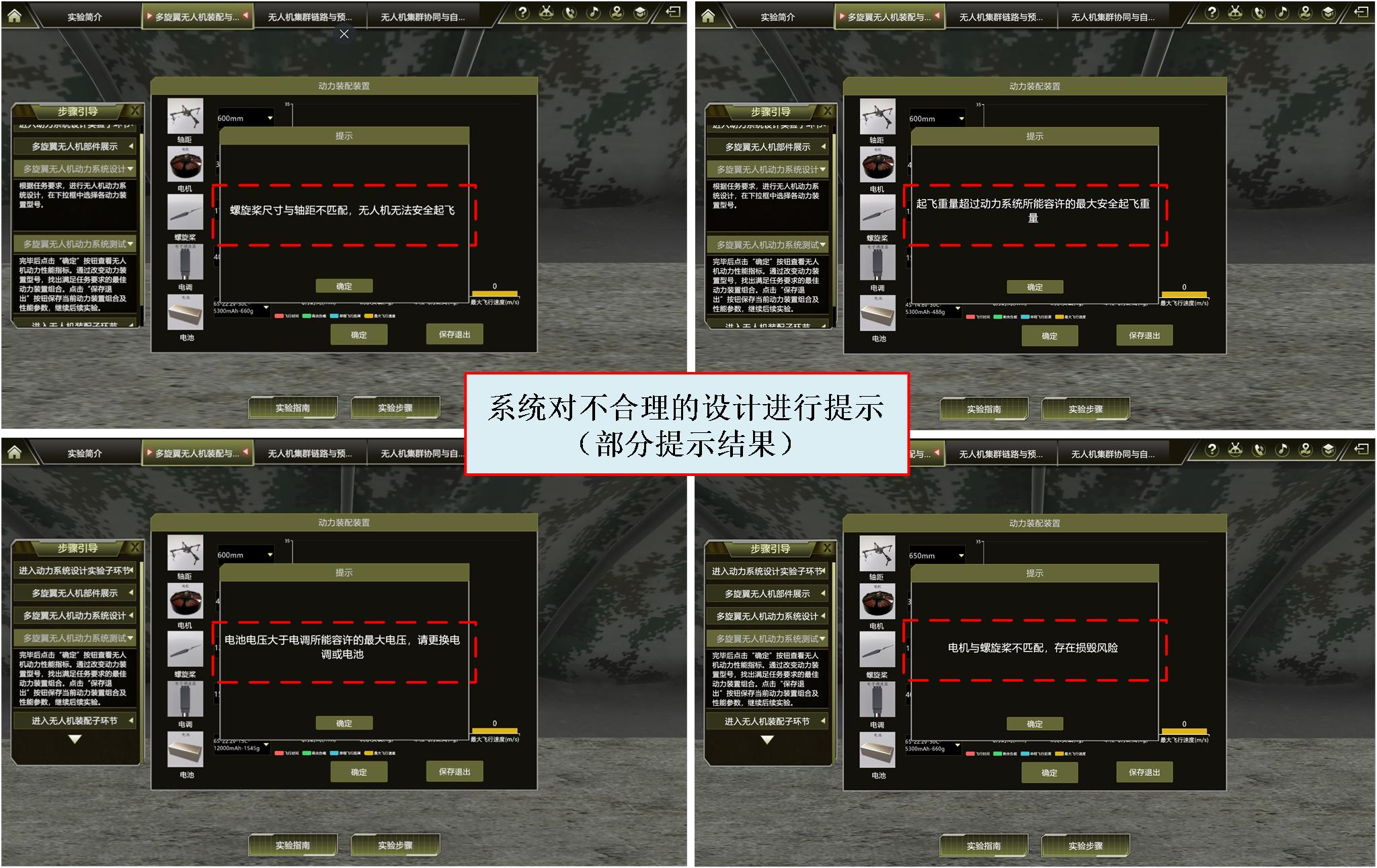
3如图 9 标,学生自主判断是否理想满足设计要求。点击“保存退出”按钮保 存当前动力装置组合及性能参数,继续后续实验。

步骤3 多旋翼无人机动力系统测试
图9 系统对不合理的设计进行提示
图10 系统根据学生的选择计算动力性能指标
4点击备件库,查看多旋翼无人机所有部件。如图 11 所示,学生首先用鼠标 左键点击起落架,拖动并放置到安装台,然后取出多旋翼无人机的其他部件,逐个拖动到正确的安装位置(绿色半透明立方体为安装位置提示),完成装配。安装过程中可通过键盘的 W(前进)、A(向左)、S(向后)、D(向右)、空 格(跳跃)按键在装配室内移动。


步骤4 多旋翼无人机装配
图11 放置多旋翼无人机起落架
图12 安装多旋翼无人机其他部件
5本项目引导学生开展容错探究式自主学习。装配过程中,如果出现正反螺旋 桨位置安装错误,或者没有正确调整 GPS 模块的安装方向,没有正确校准磁力 计、加速度计本项目不会中断学生实验。安装完毕后,在试飞过程中无法解锁遥 控器,或者发生无人机侧翻等事故,才会暴露错误。正反螺旋桨的正确安装位置、 GPS 模块的方向调整方法、磁力计、加速度计分别如图 13,图 14,图 15,图 16, 图 17 所示。

图13 正反螺旋桨的正确安装位置

图14 点击GPS模块调整方向
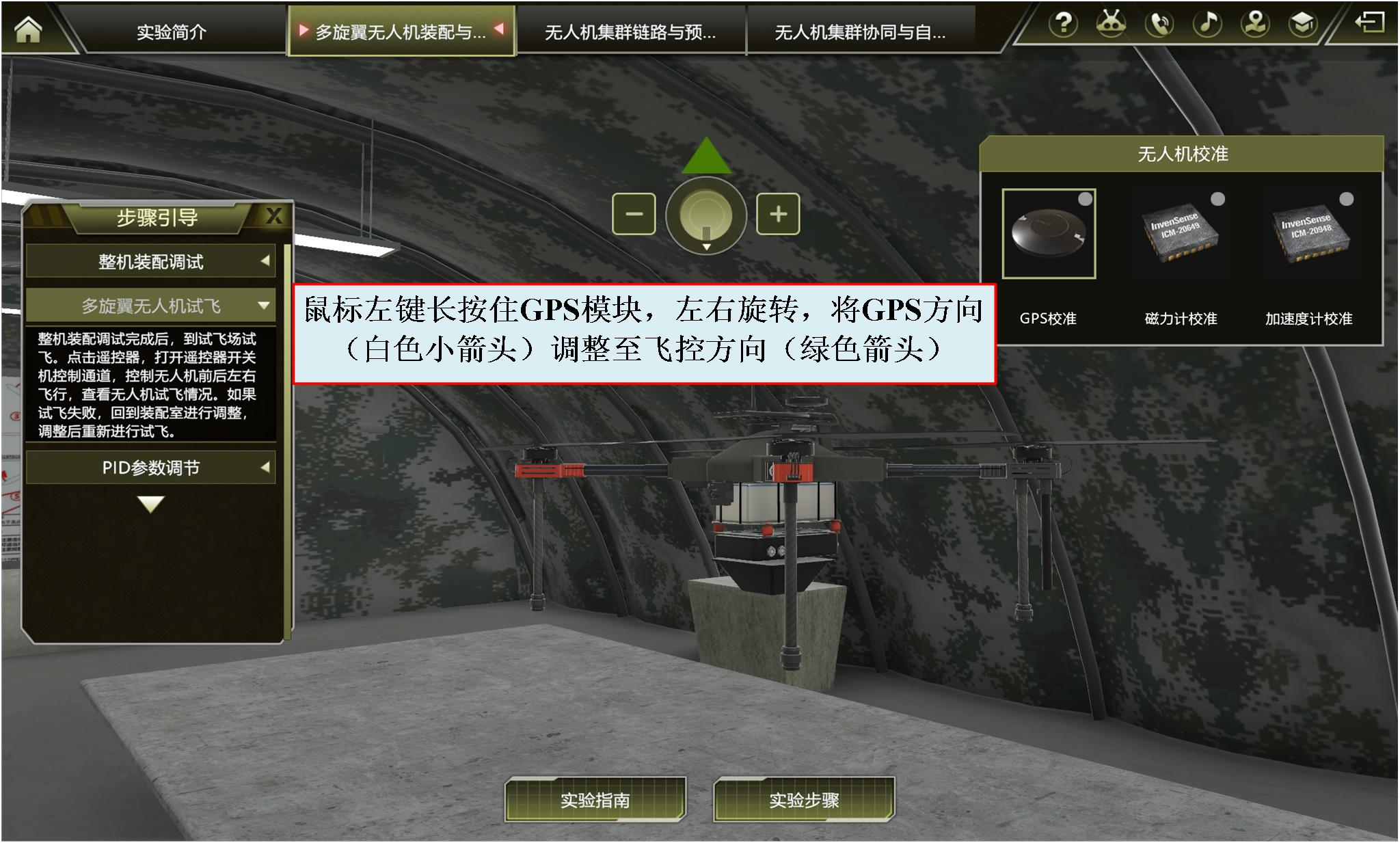
图15 GPS模块方向调整过程

图16 磁力计模块校准过程

图17 磁力计模块校准过程
步骤5 整机装配调试
6装配完成后,到试飞场进行试飞。如图 18 和图 19 所示,点击遥控器,展开 遥控器面板,打开遥控器开关和控制通道,控制无人机飞行。如果在试飞过程中出现遥控器无法解锁、无人机侧翻等各种事故,则要求学生查阅知识角中的相关资料,自主探究错误原因,并返回装配室调整,直至试飞成功。








图25 返回装配室重新安装螺旋桨

图26 多旋翼无人机装配成功
步骤6 多旋翼无人机试飞
图18 展开遥控器面板并解锁遥控器
图19 使用遥控器控制多旋翼无人机飞行
图20 GPS方向设置错误导致遥控器无法解锁
图21 返回装配室调整GPS方向
图22 正反螺旋桨安装错误导致多旋翼无人机侧翻
图23 返回装配室重新安装螺旋桨
图24 多旋翼无人机装配成功
7装配成功后,要求学生进一步对多旋翼无人机 PID 控制参数进行调节。首 先对比例(P)参数进行调节,观察多旋翼无人机飞行姿态。如果 P 值过低,多 旋翼无人机会左右晃动,甚至发生侧翻;增大 P 值,晃动情况会逐渐减缓;如果 P 值设置过高,多旋翼无人机则开始出现高频抖动;降低 P 值直至抖动消失。

图27 比例(P)参数调节
步骤 7. PID 调参:比例(P)调节
8对积分(I)参数进行调节,观察多旋翼无人机飞行姿态。如果多旋翼无人 机发生飘移,则需增大 I 值;如果多旋翼无人机高频抖动则应降低 I 值;如果在 操控过程中发生无人机回弹现象,则应降低 I 值。

步骤7 PID调参:积分(I)调节
图28 积分(I)参数调节
9对微分(D)参数进行调节,观察无人机飞行姿态。如果无人机姿态调整对 于输入指令响应迟缓,应当增大 D 的值;如果无人机高频抖动,则应该降低 D 的值。
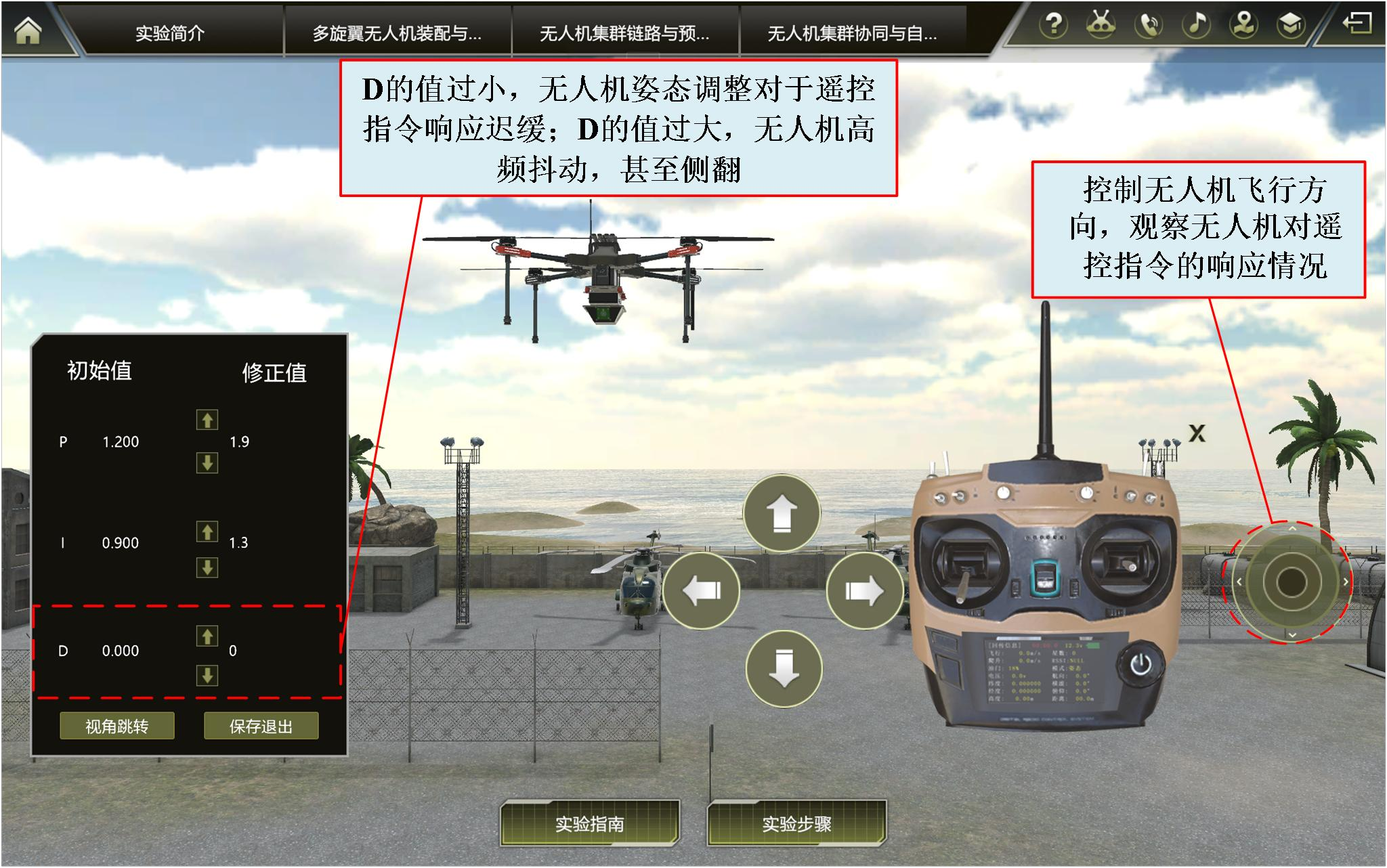
步骤8 PID调参:微分(D)调节
图29 微分(D)参数调节
通过调节PID控制参数,最终使得多旋翼无人机飞行状态平稳。
10如图 30 所示,学生查看并提交环节一的实验结果,系统自动完成评分。
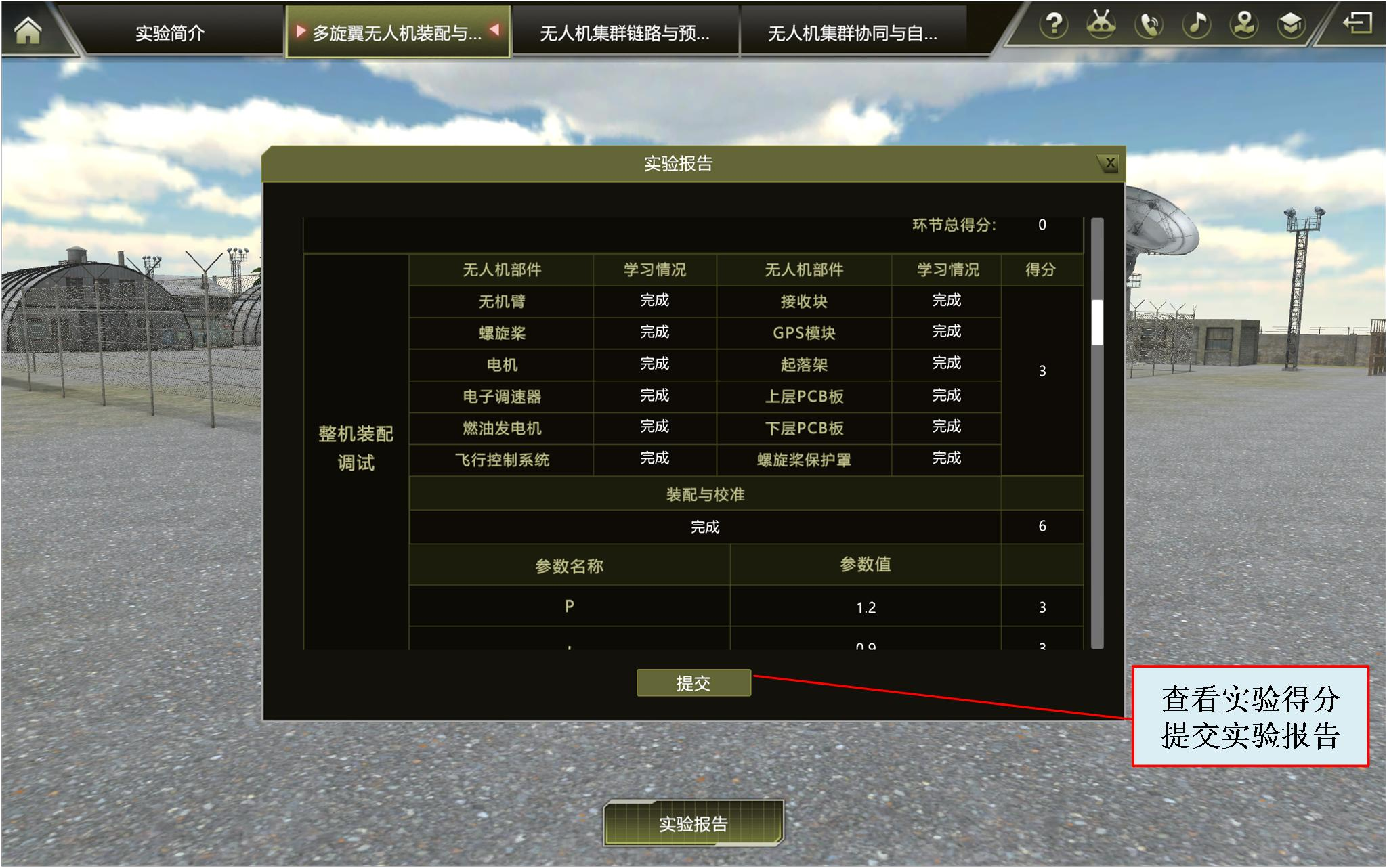
图30 查看并提交本环节实验数据
步骤9 提交环节一实验结果
END
环节二:无人机集群链路预算与组网
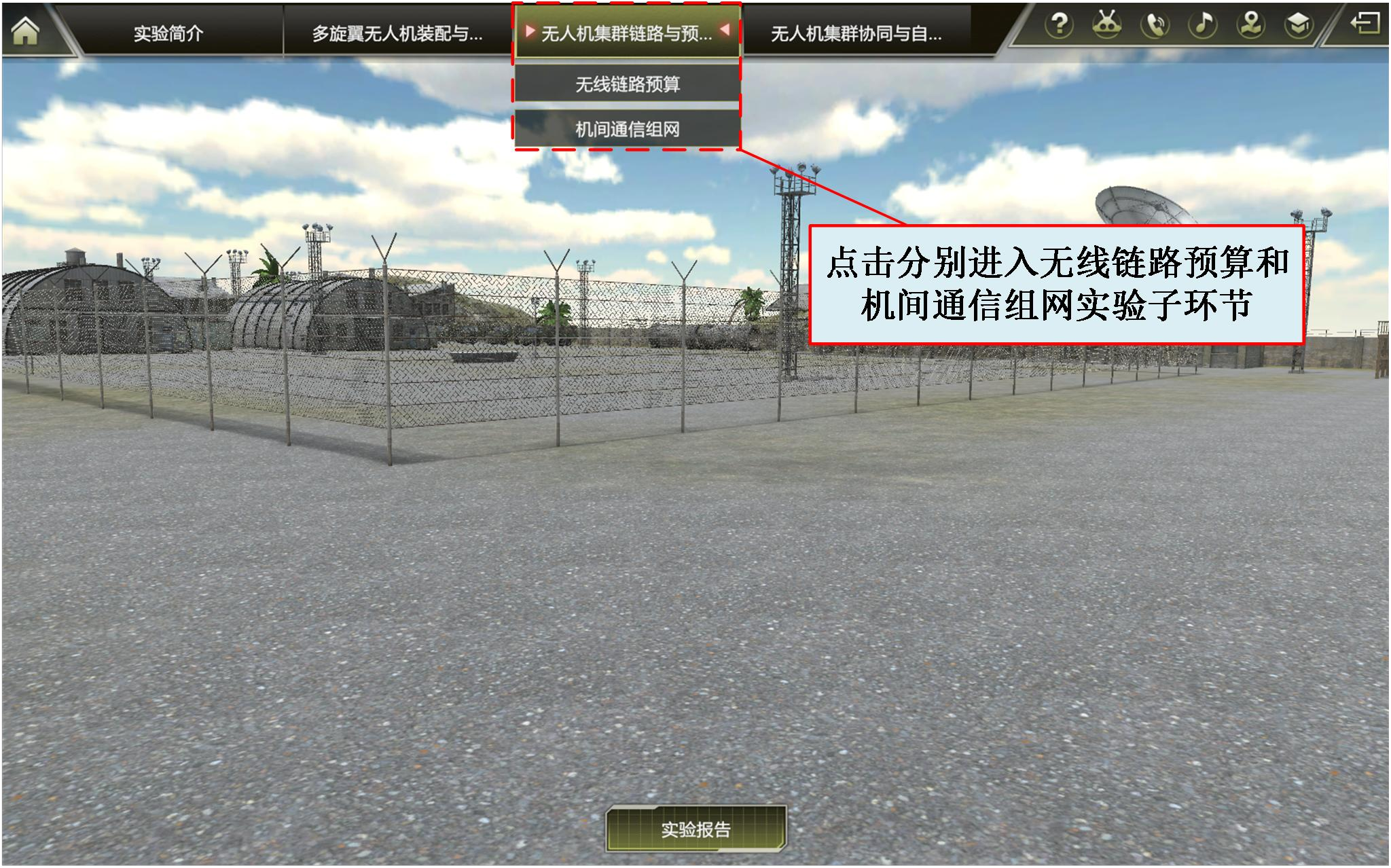
图 31 无人机集群链路预算与组网实验环节
1如图 32 所示,本步骤随机生成一组通信系统参数。学生根据给定的参数, 采用无线链路预算方法,线下计算满足无人机通信距离要求的最小信号发送功率。

步骤10 无人机发送信号功率设计
图32 无人机信号发送功率设计
2将计算得到的发送功率填入“最小发送功率”输入窗口,点击“功率测试” 按钮。如图 33 所示,测试开始后,红色圆圈表示设计任务要求达到的信号传输 范围,圆心处的无人机向运动中的邻居无人机发送信号。发射功率设置过小,飞行轨迹为黄色,表示发射失败;发射功率设置合适,飞行轨迹为绿色,表示发射成功;发射功率设置过大,飞行轨迹为绿色,超出红色圆圈,表示发射失败。学生通过测试,判断设置的信号发送功率是否能满足通信传输距离要求。点击图32 中“保存退出”按钮,记录当前发送功率值。

步骤11 无人机间信号传输测试
图33 无人机间信号传输测试
3

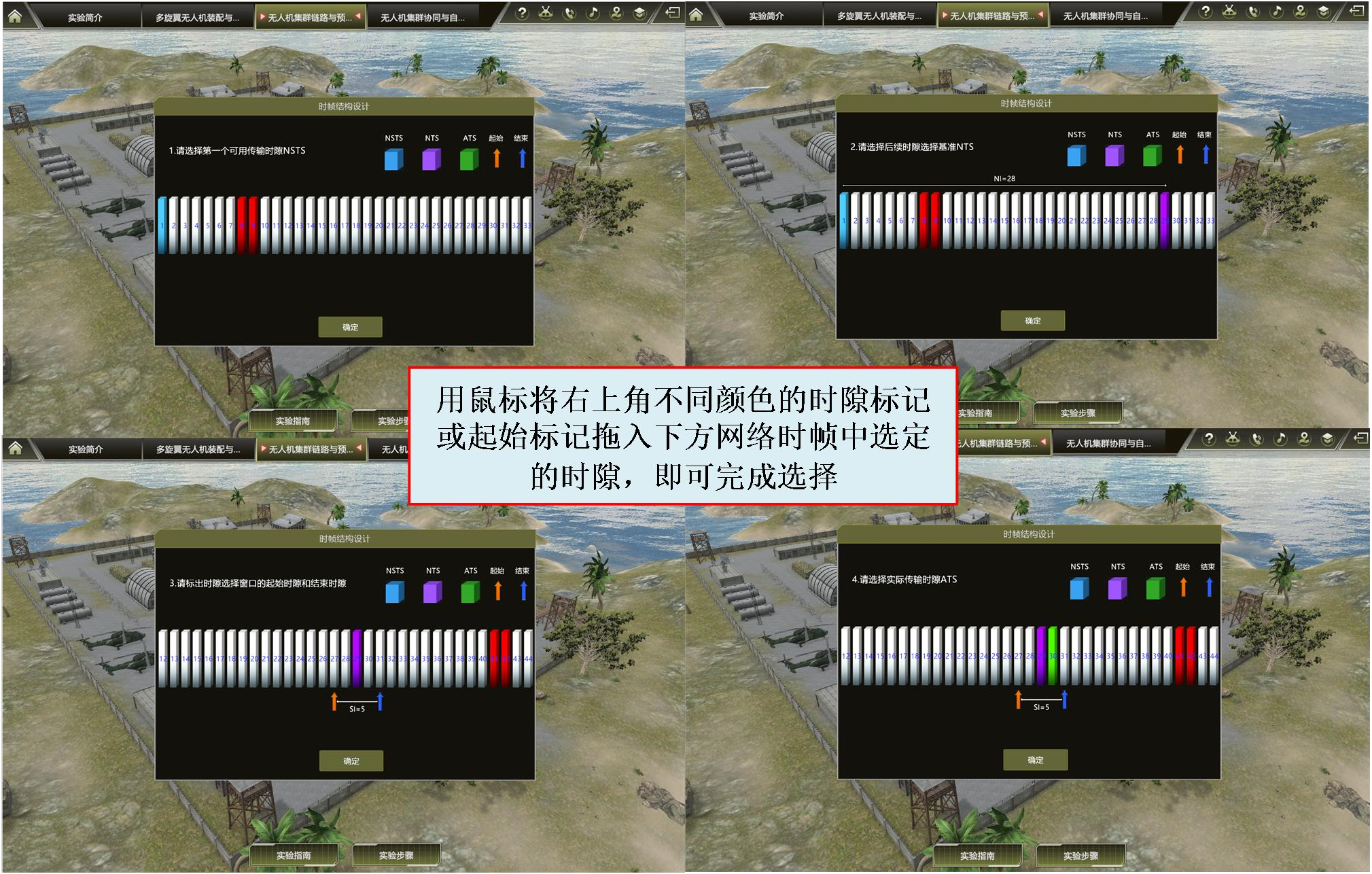
步骤12 自组织时分多址协议时帧结构设计
如图 34 所示,本步骤随机生成自组织时分多址接入协议(STDMA)的参数,要求学生根据协议原理,对网络时帧结构进行设计。由网络时帧的总时隙数 SL和系统要求的报文报告率 u 确定时隙选择间隔 NI;根据系统提供的时隙状态表,确定第一个可用传输时隙 NSTS;再确定后续时隙选择基准 NTS,时隙选择窗口SI 及实际传输时隙 ATS。
图34 无人机间信号传输测试
图35 自组织时分多址接入协议时帧设计
4
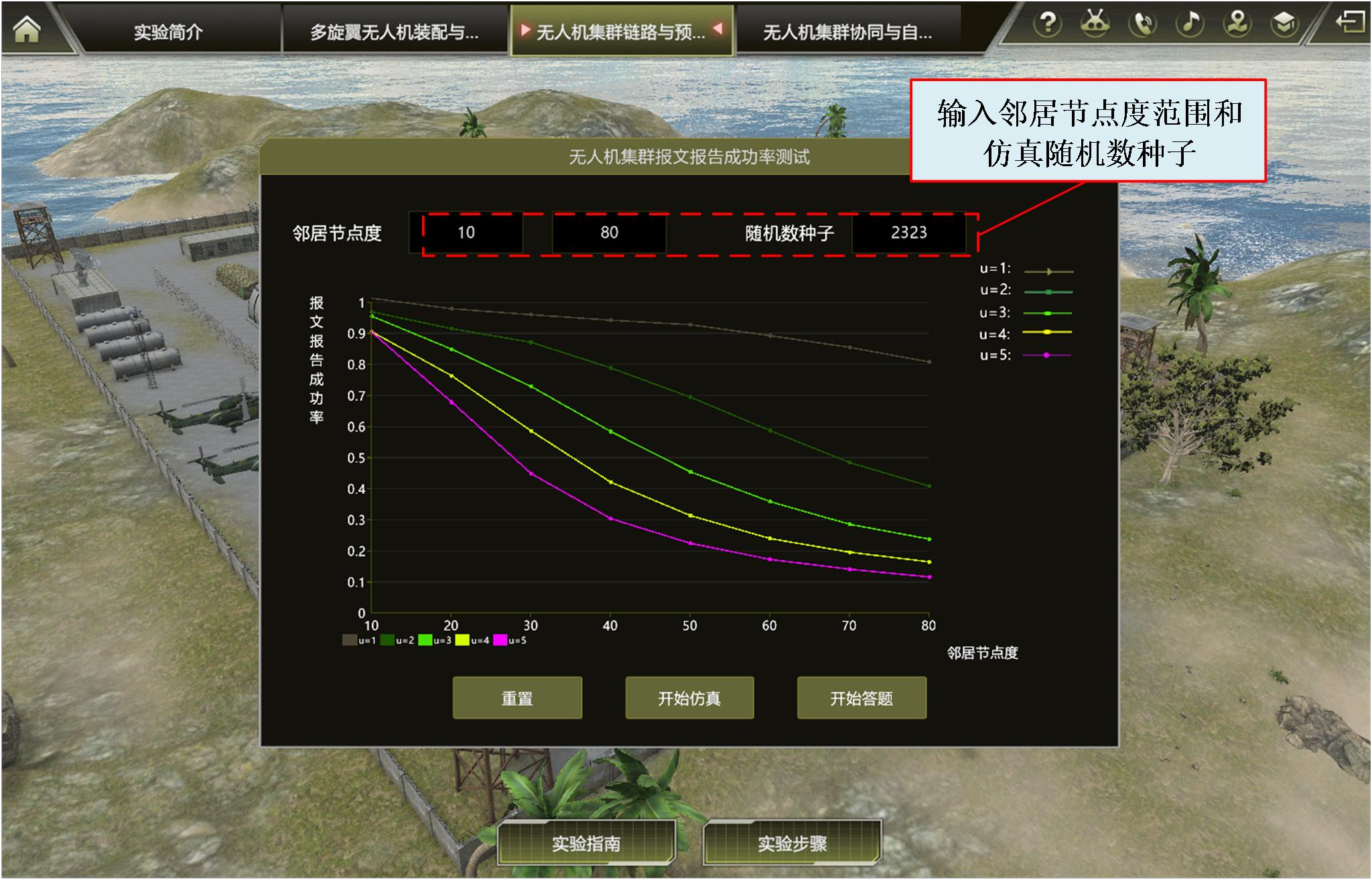
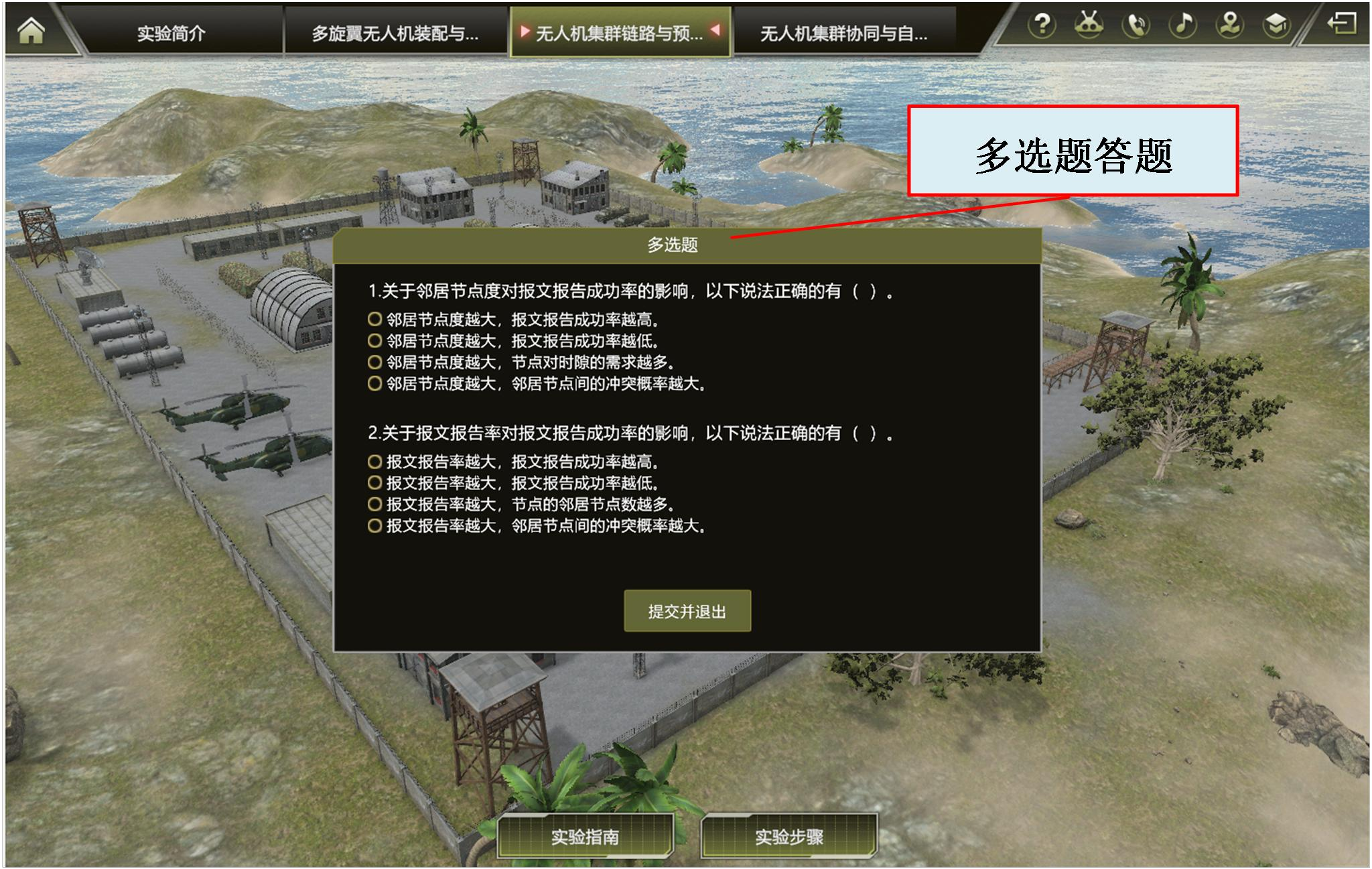
步骤13 自组织时分多址协议报文报告成功率测试
改变邻居节点度变化范围和随机数种子值,测试不同报文报告率条件下,报文报告成功率随邻居节点度的变化趋势,并分析原因。提交实验结果时,根据分析得出的结论完成多项选择题。
图36 无人机集群报文报告成功率测试
图 37 无人机集群报文报告成功率答题
5
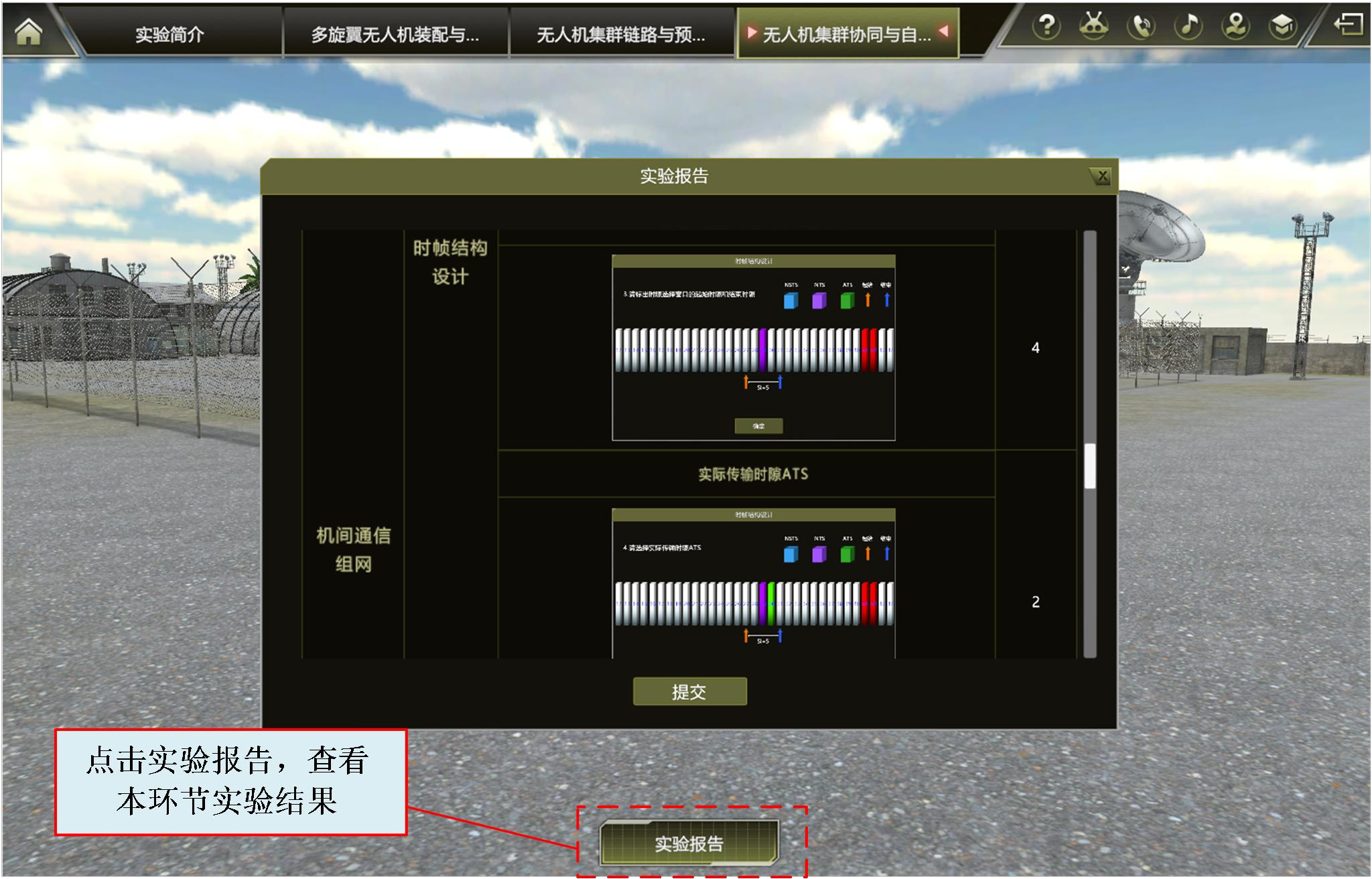
步骤14 提交环节二实验结果
如图35所示,学生查看并提交环节二的实验结果,系统自动完成评分。
图38 查看并提交本环节实验结果
END
环节三:无人机集群协同与自主避障
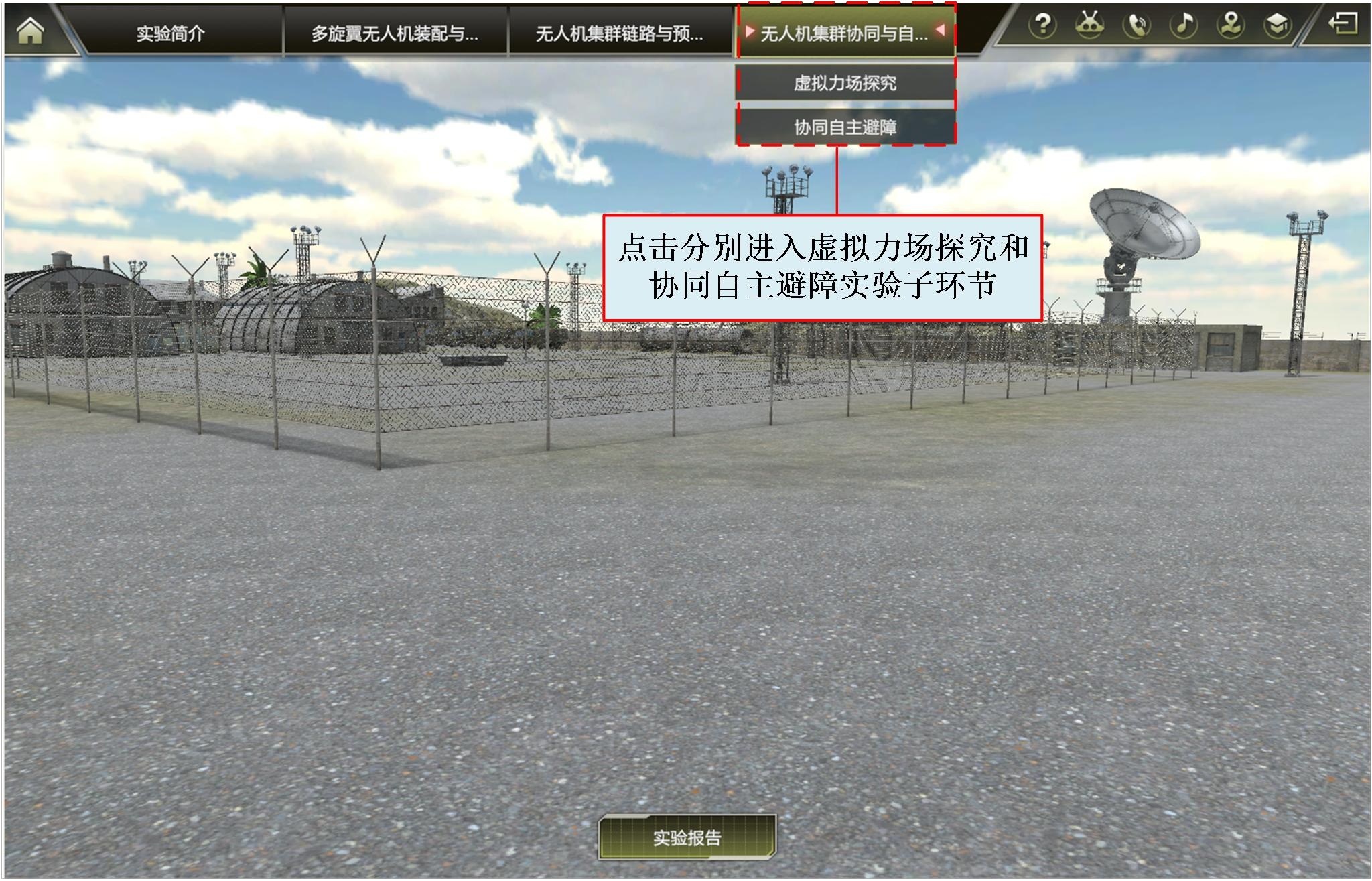
图 39 无人机集群协同与自主避障实验环节
1Boids 模型给出了集群行为的三条基本规则,防碰撞、速度匹配和聚合。本 环节采用虚拟力场法实现基于Boids模型的群体协同与自主避障。该方法将Boids 模型对无人机集群节点运动的影响类比为力对物体运动的影响。本实验环节要求学生探究目标无人机节点处在不同区域时虚拟力场的变化情况,观察基于平行四边形法则的虚拟力合成过程。通过科普化的类比,降低学生理解虚拟力场法的难度。学生拖动高亮无人机至另一架无人机的聚合区域、防碰撞区域、速度匹配区 域、避障区域和其他区域,观察不同区域的虚拟力场合成情况,理解虚拟力场法的原理。



步骤15 基于Boid模型的虚拟力合成原理探究
图40 聚合区域虚拟力场分析
图41 防碰撞区域虚拟力场分析
图42 避障力区域虚拟力场分析
2将前进力权重因子设置为大于 0 的任意值,排斥力、聚合力和避障力权重因 子,排斥力范围,速度匹配范围均设置为 0,测试无协同条件下无人机集群的性 能。

操作示例:如图 43 所示,我们将初始无人机数量设置为 100 架,将前进力 权重因子设置为 0.8,排斥力、聚合力和避障力权重因子,排斥力范围,速度匹 配范围均设置为 0。无人机集群从我方基地起飞,在第二次遇到障碍物之后,所 有飞机均被撞毁。
步骤16 无协同条件下无人机集群性能测试
图 43 无协同条件下无人机集群性能测试
3

步骤17 无人机集群拓扑控制参数调节
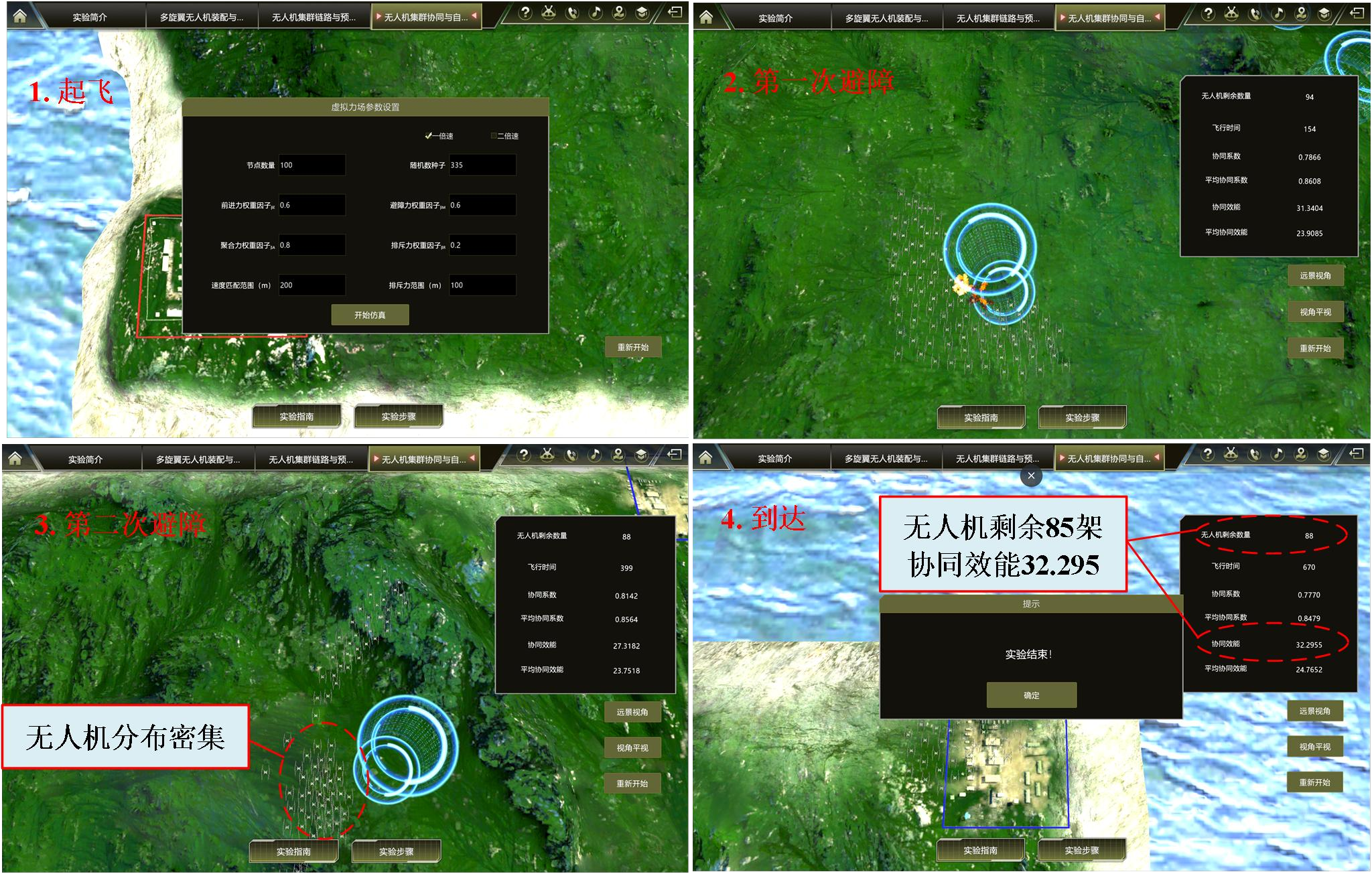
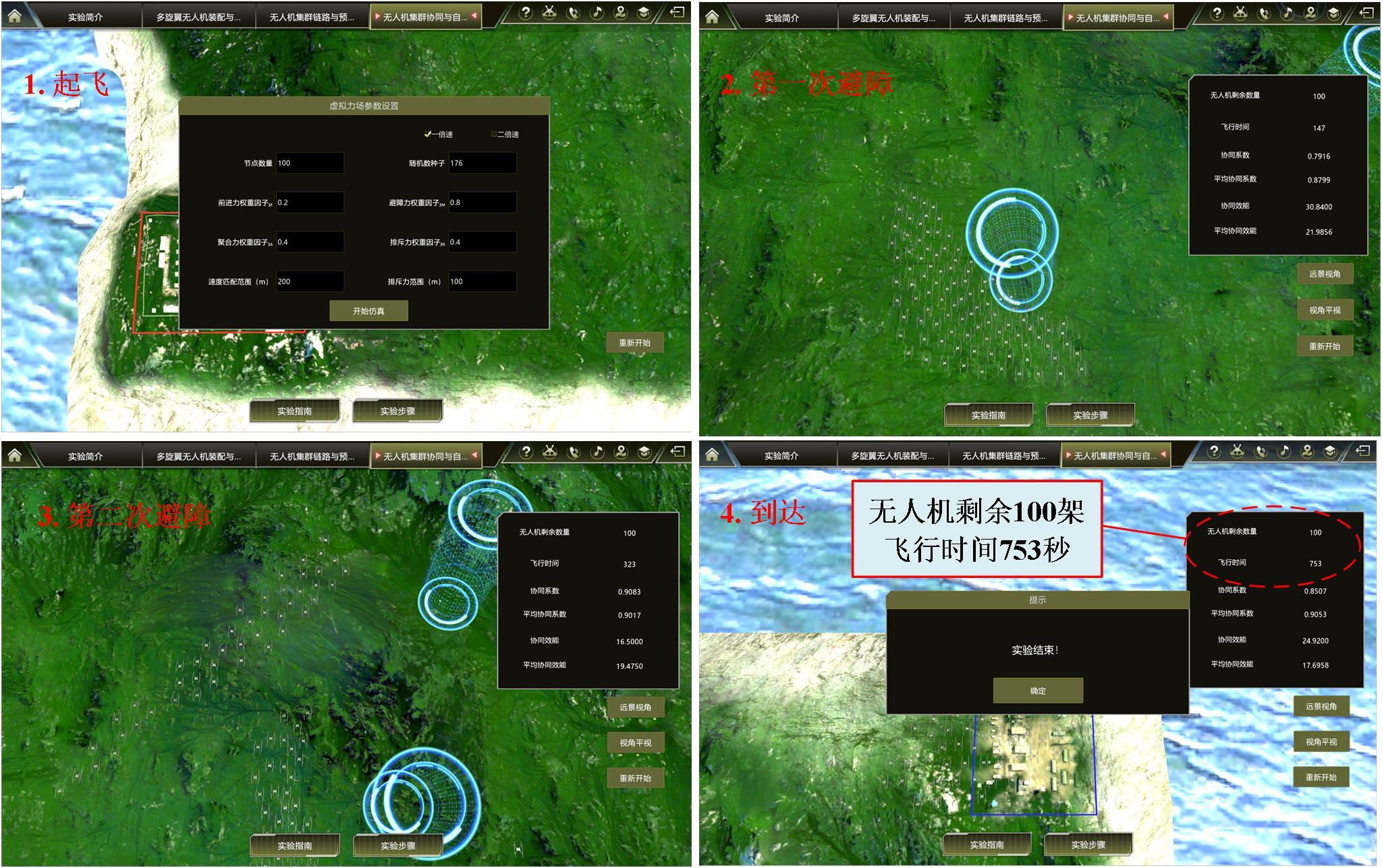
将虚拟力场参数中的前进力和避障力权重因子设置为大于 0 的固定值,改变排斥力和聚合力权重因子(拓扑控制参数),分析它们的相对取值对无人机集群性能的影响,确定合理的取值。
操作示例:我们将初始无人机数量设置为 100 架,前进力和避障力权重因子均设置为 0.6,排斥力范围和速度匹配范围分别设置为 100 米和 200 米。将排斥力和聚合力权重因子分别设置为 0.8 和 0.2,仿真过程和结果如图 44 所示;将排斥力和聚合力权重因子分别设置为 0.2 和 0.8,仿真过程和结果如图 45 所示。由仿真过程和结果可以得出结论:如果排斥力权重因子相比聚合力权重因子设置过大,避障效果好,但无人机集群覆盖范围过大,协同效能低;反之则无人机分布密集,协同效能高,但容易撞毁。
图44 排斥力权重因子设置过大条件下无人机集群性能测试
图45 聚合力权重因子设置过大条件下无人机集群性能测试
4将虚拟力场参数中的排斥力和聚合力权重因子设置为大于 0 的固定值,改变 前进力和避障力权重因子(航迹规划参数),分析它们的相对取值对无人机集群 航迹规划的影响,确定合理的取值。

步骤18 无人机集群航迹规划参数调节
操作示例:我们将初始无人机数量设置为 100 架,排斥力和聚合力权重因子 均设置为 0.4,排斥力范围和速度匹配范围分别设置为 100 米和 200 米。将前进 力和避障力权重因子分别设置为 0.8 和 0.2,仿真过程和结果如图 46 所示;将前 进力和避障力权重因子分别设置为 0.2 和 0.8,仿真过程和结果如图 47 所示。由 仿真过程和结果可以得出结论:如果前进力权重因子相比避障力权重因子设置过 大,避障效果差,但集群飞抵敌方基地上空需要的时间短;反之则避障效果好,但飞抵敌方基地上空需要的时间长。
图46 前进力权重因子设置过大条件下无人机集群性能测试
图47 避障力权重因子设置过大条件下无人机集群性能测试
5


步骤19 无人机集群速度匹配和排斥力范围调节
将虚拟力场参数中的前进力、排斥力、聚合力和避障力权重因子设置为大于0的固定值,改变速度匹配范围和排斥力范围,分析它们对无人机集群性能的影响,确定合理的取值。
操作示例:我们将初始无人机数量设置为100架,排斥力、聚合力、前进力和避障力权重因子分别设置为0.4、0.6、0.6、0.4 ,速度匹配范围大于排斥力范围,排斥力范围分别设置为300米和50米。仿真过程和结果如图46、47所示。由仿真过程和结果可以得出结论:排斥力范围设置过大,无人机分布稀疏,协同效能低,避障效果好;反之则无人机集群分布密集,容易撞毁,协同效能高。
图48 排斥力范围设置过大条件下无人机集群性能测试
图49 排斥力范围设置过小条件下无人机集群性能测试
6
步骤20 无人机集群协同避障性能优化与测试
综合实验步骤16至19的结论,综合设计虚拟力场各参数的取值,保证无人机集群性能最优。7
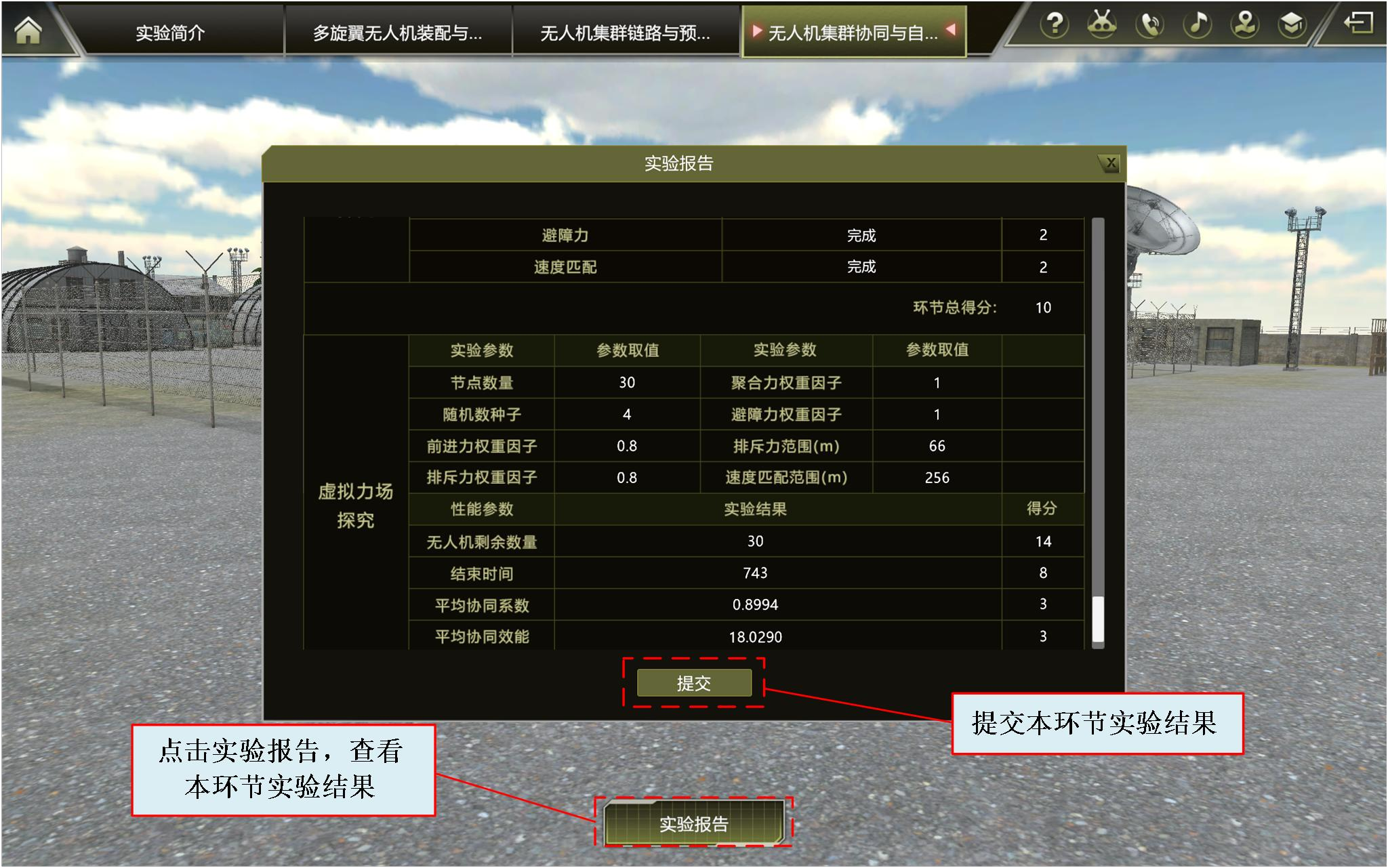
步骤21 提交环节三实验结果
如图47所示,学生查看并提交环节三的实验结果,系统自动完成评分。
图50 提交本环节实验结果
8
步骤22 提交实验报告
实验完成后,学生在线提交实验报告。系统按照3个实验环节各占30%、30%和40%的比例自动完成实验成绩评定。END